Utiliser Sensor Shield V5.0 et l’Arduino pour piloter des servomoteurs
Tutorial plan
1- Présentation du Sensor Shield V5.0
2- Matériel nécessaire pour contrôler 4 servomotors
3- Schéma de câblage du système
4- Programme Arduino
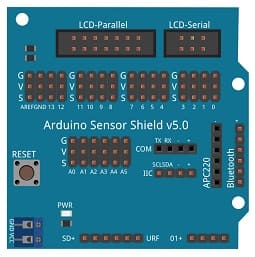
Présentation du Sensor Shield V5.0
Le Sensor Shield V5.0 est une carte d'extension conçue pour faciliter la connexion de divers capteurs, modules et servomoteurs à une carte Arduino. Elle est particulièrement utile pour les débutants et les développeurs de projets électroniques, car elle simplifie les branchements grâce à des ports standardisés et bien organisés.
Applications
Projets robotiques (contrôle de servomoteurs).
Collecte de données avec des capteurs multiples (température, humidité, lumière, etc.).
Interfaces avec des modules de communication (Bluetooth, RF, Wi-Fi).
Commandes pour des projets interactifs.
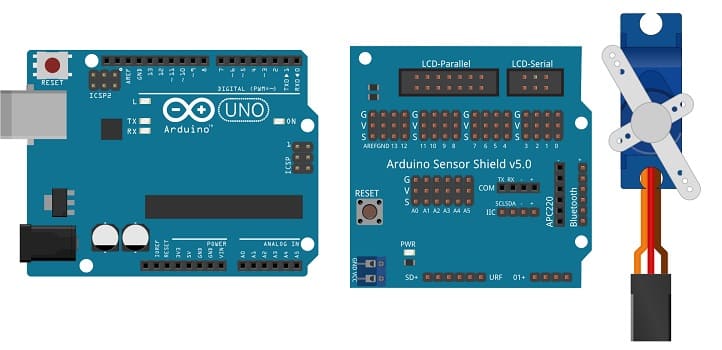
Matériel nécessaire pour contrôler 4 servomotors
Arduino UNO

Arduino UNO est un microcontrôleur utilisé pour contrôler les servomoteurs via le Sensor Shield.
Il fournir les signaux PWM pour contrôler la position des servomoteurs.
Sensor Shield V5.0
Sensor Shield V5.0 est une carte d'extension pour simplifier les connexions entre l'Arduino et les servomoteurs.
Elle simplifie le branchement des servomoteurs et gère leur alimentation.
Servomoteurs (x4)

Les servomoteur sont des dispositifs électromécaniques permettant un contrôle précis de la position angulaire.
Source d’alimentation externe

Elle fournit une alimentation suffisante pour les servomoteurs.
Schéma de câblage du système
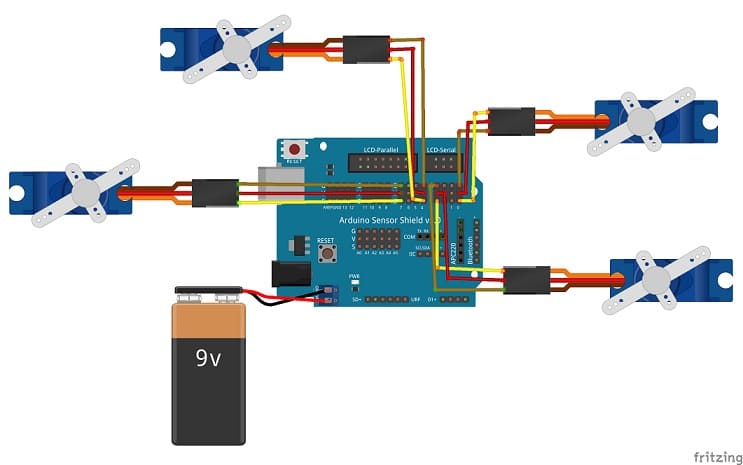
Connecter :
1- le Shield Sensor V5.0 à la carte Arduino UNO
2- le premier servomoteur au port N°0 du Shield Sensor V5.0
3- le deuxième servomoteur au port N°3 du Shield Sensor V5.0
4- le troisième servomoteur au port N°4 du Shield Sensor V5.0
5- le quatrième servomoteur au port N°7 du Shield Sensor V5.0
Programme Arduino
Voici un exemple simple utilisant la bibliothèque Servo.h pour contrôler 4 servos via les broches
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 |
#include <Servo.h> Servo servo1; // create servo object to control a servo Servo servo2; // create servo object to control a servo Servo servo3; // create servo object to control a servo Servo servo4; // create servo object to control a servo int pos = 0; // variable to store the servo position void setup() { servo1.attach(0); // attaches the servo on pin 0 servo2.attach(3); // attaches the servo on pin 3 servo3.attach(4); // attaches the servo on pin 4 servo4.attach(7); // attaches the servo on pin 7 servo1.write(0); servo2.write(0); servo3.write(0); servo4.write(0); } void loop() { for (pos = 0; pos <= 180; pos += 1) { // goes from 0 degrees to 180 degrees // in steps of 1 degree servo1.write(pos); // tell servo1 to go to position in variable 'pos' delay(15); // waits 15ms for the servo to reach the position } for (pos = 0; pos <= 180; pos += 1) { // goes from 0 degrees to 180 degrees // in steps of 1 degree servo2.write(pos); // tell servo2 to go to position in variable 'pos' delay(15); // waits 15ms for the servo to reach the position } for (pos = 0; pos <= 180; pos += 1) { // goes from 0 degrees to 180 degrees // in steps of 1 degree servo3.write(pos); // tell servo3 to go to position in variable 'pos' delay(15); // waits 15ms for the servo to reach the position } for (pos = 0; pos <= 180; pos += 1) { // goes from 0 degrees to 180 degrees // in steps of 1 degree servo4.write(pos); // tell servo4 to go to position in variable 'pos' delay(15); // waits 15ms for the servo to reach the position } for (pos = 180; pos >= 0; pos -= 1) { // goes from 180 degrees to 0 degrees servo1.write(pos); // tell servo1 to go to position in variable 'pos' delay(15); // waits 15ms for the servo to reach the position } for (pos = 180; pos >= 0; pos -= 1) { // goes from 180 degrees to 0 degrees servo2.write(pos); // tell servo2 to go to position in variable 'pos' delay(15); // waits 15ms for the servo to reach the position } for (pos = 180; pos >= 0; pos -= 1) { // goes from 180 degrees to 0 degrees servo3.write(pos); // tell servo3 to go to position in variable 'pos' delay(15); // waits 15ms for the servo to reach the position } for (pos = 180; pos >= 0; pos -= 1) { // goes from 180 degrees to 0 degrees servo4.write(pos); // tell servo4 to go to position in variable 'pos' delay(15); // waits 15ms for the servo to reach the position } } |
0 commentaire
laisser un commentaire
Passion de robotique

Tutoriels récents





Atelier robotique

Tutoriels populaires





Construction des robots

Tutoriels plus commentés




Bras robotique

Categories
Maison intelligente





