Système mobile de suivi d’un objet en mouvement basé sur Micro:bit et HC-SR04
Plan du tutoriel
Introduction
1- Comment le système mobile de suivi d'un objet en mouvement fonctionne ?
2- Les composants nécessaires du système
3- Schéma de câblage du système
4- Programmer la carte Micro:bit pour commander le système
Introduction
Un système mobile de suivi d'un objet en mouvement est une solution technologique permettant de suivre et de surveiller la position, la trajectoire et éventuellement d'autres paramètres d'un objet qui se déplace. Ce type de système est utilisé dans une grande variété d'applications, allant de la surveillance de flottes de véhicules à la navigation autonome de drones en passant par le suivi de colis en temps réel.
Voici quelques caractéristiques et composants typiques d'un tel système :
Capteurs : Ils peuvent inclure des dispositifs tels que des GPS, des accéléromètres, des gyroscopes, des caméras, des radars, des LiDAR, des capteurs de vision, etc. Ces capteurs sont utilisés pour collecter des données sur la position, la vitesse, l'orientation et d'autres paramètres de l'objet en mouvement.
Traitement des données : Les données collectées par les capteurs sont généralement traitées par un logiciel embarqué ou une application informatique qui effectue des calculs pour estimer la position et la trajectoire de l'objet en mouvement.
Algorithmes de suivi : Ces algorithmes sont utilisés pour analyser les données collectées par les capteurs et estimer la position future de l'objet en mouvement. Ils peuvent utiliser des techniques telles que la fusion de capteurs, la prédiction de trajectoire, la corrélation de points de référence, etc.
Communication : Le système peut nécessiter des moyens de communication pour transmettre les données de suivi à une station de contrôle ou à d'autres appareils en temps réel. Cela peut inclure des technologies sans fil telles que le Wi-Fi, le Bluetooth, les réseaux cellulaires, etc.
Interface utilisateur : Pour permettre aux utilisateurs de surveiller et de contrôler le système, une interface utilisateur conviviale peut être fournie, permettant de visualiser les données de suivi, de configurer les paramètres du système, etc.
Plateforme mobile : Le système peut être intégré à une plateforme mobile telle qu'un véhicule terrestre, un drone, un navire, etc., permettant ainsi le suivi d'objets en mouvement dans divers environnements et conditions.
En résumé, un système mobile de suivi d'un objet en mouvement combine des capteurs, des algorithmes de traitement des données, des fonctionnalités de communication et éventuellement une interface utilisateur pour fournir des informations précises sur la position et la trajectoire d'un objet en déplacement.
Comment le système mobile de suivi d'un objet en mouvement fonctionne ?
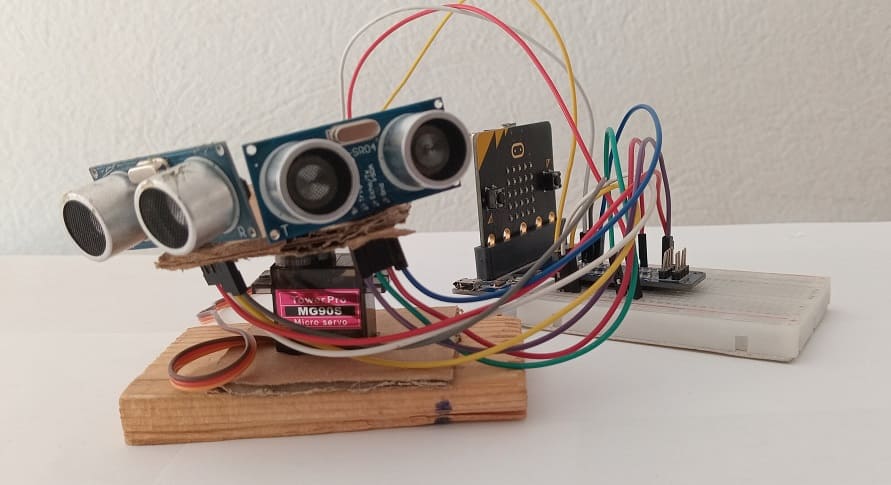
Le système mobile de suivi d'un objet en mouvement basé sur Micro:bit, HC-SR04 et servomoteur est conçu pour suivre et surveiller un objet en mouvement en utilisant des capteurs et des actionneurs contrôlés par un microcontrôleur tel que le Micro:bit. Voici une description générale du fonctionnement de ce système :
Micro:bit : Le Micro:bit est le cœur du système, agissant comme le contrôleur principal. Il est programmé pour collecter les données des capteurs et contrôler le servomoteur en fonction des informations reçues.
Deux capteurs à ultrasons HC-SR04 : Le HC-SR04 est un capteur à ultrasons qui est utilisé pour mesurer la distance entre lui-même et l'objet en mouvement. Il émet des impulsions ultrasonores et mesure le temps qu'elles mettent à rebondir sur l'objet et à revenir au capteur. Cette mesure est utilisée pour déterminer la distance entre le capteur et l'objet.
Servomoteur : Le servomoteur est un actionneur utilisé pour orienter le système dans la direction de l'objet en mouvement. Il peut pivoter dans une plage d'angles prédéfinie, ce qui permet au système de suivre l'objet en ajustant sa position.
Fonctionnement général du système :
1- Les deux capteur HC-SR04 sont montés sur le système mobile et sont positionnés de manière à avoir une vue dégagée de l'objet en mouvement.
2- Le Micro:bit envoie des signaux aux deux capteurs HC-SR04 pour déclencher la mesure de la distance à intervalles réguliers.
3- Chacun des deux capteurs HC-SR04 envoie des impulsions ultrasonores et mesure le temps qu'elles mettent à revenir après avoir rebondi sur l'objet. À partir de ce temps, le Micro:bit calcule la distance entre le capteur et l'objet.
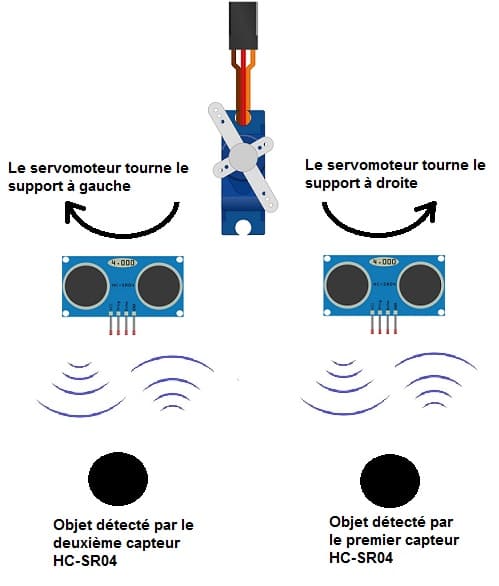
4- En fonction de la distance mesurée, le Micro:bit détermine dans quelle direction le servomoteur doit être orienté pour suivre l'objet. Par exemple, si l'objet se déplace vers la gauche, le Micro:bit envoie une commande au servomoteur pour qu'il tourne dans cette direction.
5- Le servomoteur ajuste sa position en conséquence, permettant au système de maintenir l'objet en vue.
6- Ce processus se répète à intervalles réguliers, assurant que le système suit continuellement l'objet en mouvement.
En résumé, ce système utilise le capteur à ultrasons pour détecter la position de l'objet en mouvement par rapport au système, puis utilise un servomoteur pour ajuster la position du système afin de suivre cet objet en temps réel.
Les composants nécessaires du système
Carte Micro:bit
La carte Micro:bit est un petit ordinateur programmable conçu pour l'éducation des enfants et des débutants en informatique. Elle a été développée par la BBC au Royaume-Uni en 2015 dans le but d'encourager l'apprentissage de la programmation et de l'électronique.
Carte d'extension pour Micro:bit

Pour étendre les fonctionnalités de la carte Micro:bit, vous pouvez utiliser une carte d'extension, également appelée "shield", conçue spécifiquement pour Micro:bit. Ces cartes d'extension offrent des connecteurs supplémentaires, des composants intégrés et des fonctionnalités supplémentaires pour faciliter l'ajout de capteurs, d'actionneurs et d'autres modules électroniques.
Deux Capteurs HC-SR04 :

Le capteur ultrason HC-SR04 est un dispositif électronique utilisé pour mesurer la distance entre le capteur et un objet en utilisant des ondes ultrasonores.
Servomoteur

Le servomoteur joue un rôle crucial dans le système de suivi d'objet en mouvement.
Le servomoteur est attaché au support du capteur à ultrasons. Lorsqu'il reçoit des instructions de la carte Micro:bit, le servomoteur ajuste son angle pour faire pivoter le support du capteur dans une direction spécifique.
Support

Ce support sert à être pivoté dans différentes directions pour suivre l'objet en mouvement.
Fils de connexion :

Pour établir les connexions physiques entre la carte Micro:bit, les deux capteurs HC-SR04 et le servomoteur
Plaque d'essai (Breadboard) :

On utilise le plaque d'essai pour faciliter le câblage des différents composants.
Schéma de câblage du système
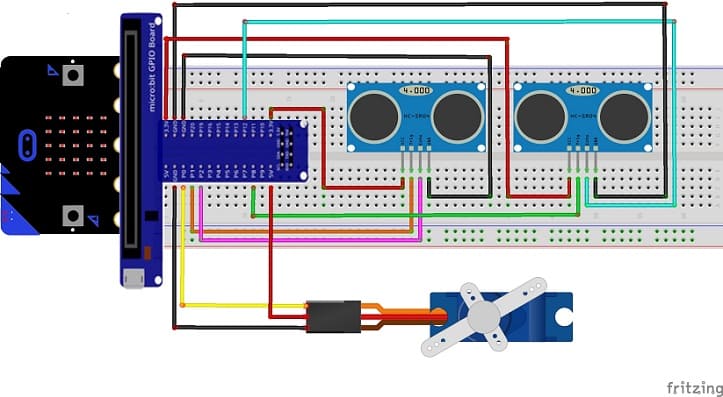
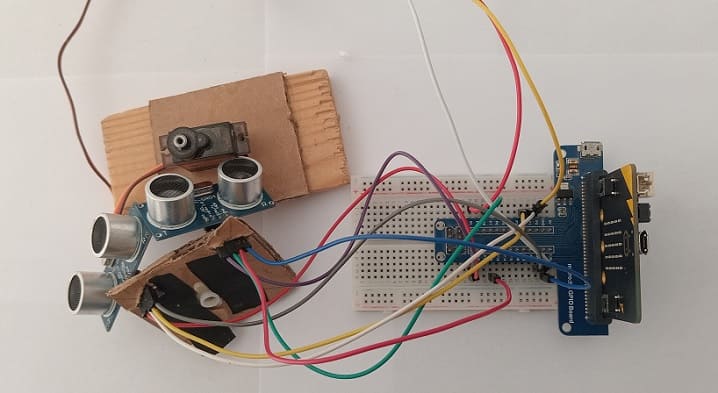
Détails de connexion du premier capteur ultrason HC-SR04
Connecter la broche VCC du capteur HC-SR04 à la broche 3.3V de la carte Micro:bit.
Connecter la broche GND du capteur HC-SR04 à la broche GND de la carte Micro:bit.
Connecter la broche Trig du capteur HC-SR04 à la broche P8 de la carte Micro:bit.
Connecter la broche Echo du capteur HC-SR04 à la broche P12 de la carte Micro:bit.
Détails de connexion du deuxième capteur ultrason HC-SR04
Connecter la broche VCC du capteur HC-SR04 à la broche 3.3V de la carte Micro:bit.
Connecter la broche GND du capteur HC-SR04 à la broche GND de la carte Micro:bit.
Connecter la broche Trig du capteur HC-SR04 à la broche P1 de la carte Micro:bit.
Connecter la broche Echo du capteur HC-SR04 à la broche P2 de la carte Micro:bit.
Détails de connexion du servomoteur
Connecter le fil rouge du servomoteur à la broche 5V de la carte GPIO.
Connecter le fil jaune du servomoteur à la broche P0 de la carte Micro:bit.
Connecter le fil marron du servomoteur à la broche GND de la carte Micro:bit.
Programmer la carte Micro:bit pour commander le système
Pour programmer un système mobile de suivi d'un objet en mouvement basé sur Micro:bit, HC-SR04 et servomoteur avec Makecode, vous pouvez suivre ces étapes simples :
1- Ouvrez l'éditeur MakeCode à l'adresse https://makecode.microbit.org/.
2- Créez un nouveau projet en cliquant sur "Nouveau projet".
3- Importer la bibliothèque Sonar pour le capteur ultrason HC-SR04 :
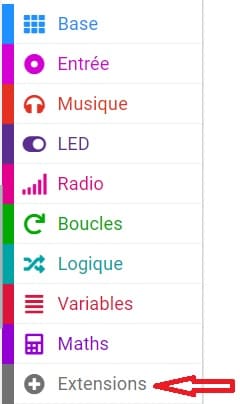
a- aller à la catégorie "Extensions"
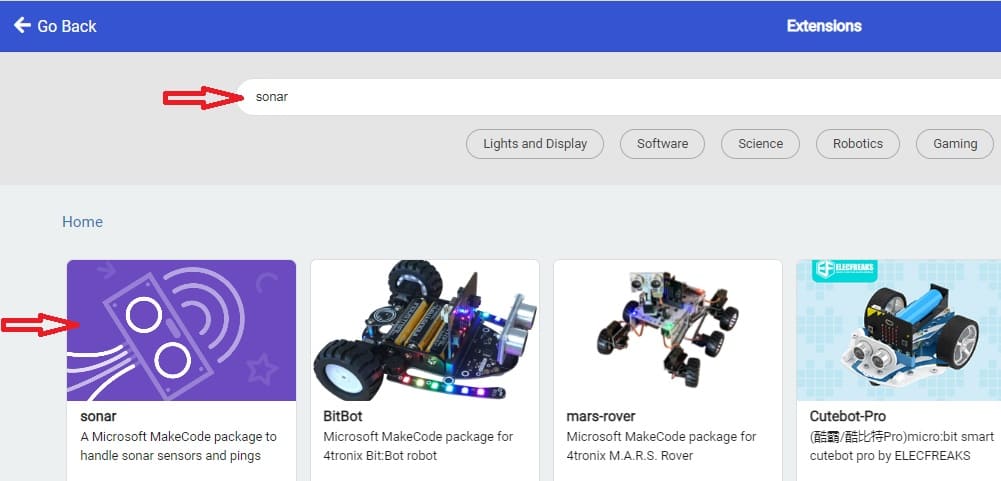
b- rechercher et ajouter l'extension "sonar"
Maintenant, vous pouvez commencer à programmer le Micro:bit pour utiliser les deux capteurs HC-SR04.
Voici un exemple de code Makecode pour un tel système :
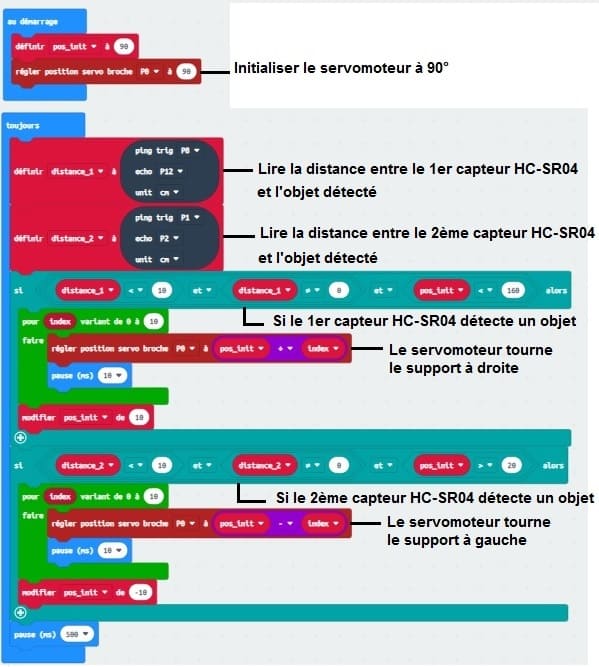
Description du programme Makecode :
1- Initialisation du servomoteur : Initialiser l'angle de rotation du servomoteur.
2- Définir deux variables : Déclarez les variables nécessaires pour stocker la distance mesurée par chacun des deux capteurs HC-SR04 et l'angle de rotation du servomoteur.
3- Programmation du suivi : Utilisez les blocs Makecode appropriés pour lire la distance de chacun des deux capteurs HC-SR04 et un objet, et faire tourner le servomoteur en fonction de cette distance.
0 commentaire
laisser un commentaire
Passion de robotique

Tutoriels récents





Atelier robotique

Tutoriels populaires





Construction des robots

Tutoriels plus commentés



Bras robotique

Categories
Maison intelligente





