Système mobile de suivi d’un objet en mouvement basé sur Arduino et HC-SR04
Plan du tutoriel
Introduction
1- Comment la carte Arduino commande le système mobile de suivi d'un objet en mouvement fonctionne ?
2- Les composants nécessaires du système
3- Schéma de câblage du système
4- Programmer la carte Arduino pour contrôler le système
Introduction
Un système mobile de suivi d'un objet en mouvement est une solution technologique permettant de suivre et de surveiller la position, la trajectoire et éventuellement d'autres paramètres d'un objet qui se déplace. Ce type de système est utilisé dans une grande variété d'applications, allant de la surveillance de flottes de véhicules à la navigation autonome de drones en passant par le suivi de colis en temps réel.
Voici quelques caractéristiques et composants typiques d'un tel système :
Capteurs : Ils peuvent inclure des dispositifs tels que des GPS, des accéléromètres, des gyroscopes, des caméras, des radars, des LiDAR, des capteurs de vision, etc. Ces capteurs sont utilisés pour collecter des données sur la position, la vitesse, l'orientation et d'autres paramètres de l'objet en mouvement.
Traitement des données : Les données collectées par les capteurs sont généralement traitées par un logiciel embarqué ou une application informatique qui effectue des calculs pour estimer la position et la trajectoire de l'objet en mouvement.
Algorithmes de suivi : Ces algorithmes sont utilisés pour analyser les données collectées par les capteurs et estimer la position future de l'objet en mouvement. Ils peuvent utiliser des techniques telles que la fusion de capteurs, la prédiction de trajectoire, la corrélation de points de référence, etc.
Communication : Le système peut nécessiter des moyens de communication pour transmettre les données de suivi à une station de contrôle ou à d'autres appareils en temps réel. Cela peut inclure des technologies sans fil telles que le Wi-Fi, le Bluetooth, les réseaux cellulaires, etc.
Interface utilisateur : Pour permettre aux utilisateurs de surveiller et de contrôler le système, une interface utilisateur conviviale peut être fournie, permettant de visualiser les données de suivi, de configurer les paramètres du système, etc.
Plateforme mobile : Le système peut être intégré à une plateforme mobile telle qu'un véhicule terrestre, un drone, un navire, etc., permettant ainsi le suivi d'objets en mouvement dans divers environnements et conditions.
En résumé, un système mobile de suivi d'un objet en mouvement combine des capteurs, des algorithmes de traitement des données, des fonctionnalités de communication et éventuellement une interface utilisateur pour fournir des informations précises sur la position et la trajectoire d'un objet en déplacement.
Comment la carte Arduino commande le système mobile de suivi d'un objet en mouvement fonctionne ?
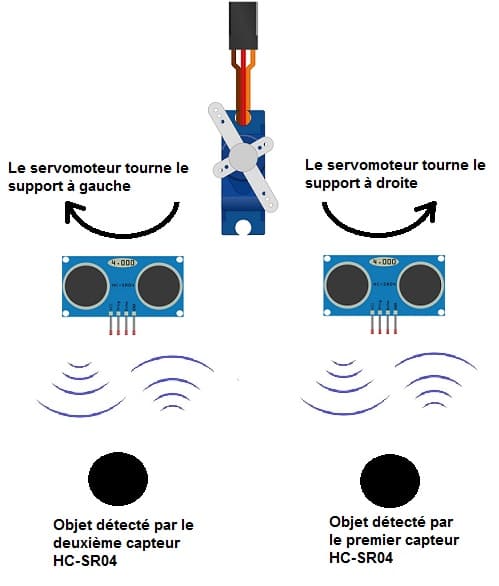
Le système de suivi d'un objet en mouvement basé sur une carte Arduino, deux capteurs HC-SR04 et un servomoteur fonctionne généralement selon le principe suivant :
1- Configuration matérielle :
- Deux capteurs à ultrasons HC-SR04 sont placés à des positions fixes sur le système, généralement à une certaine distance l'un de l'autre.
- Un servomoteur est utilisé pour orienter un dispositif de capture (comme une caméra) dans la direction de l'objet à suivre.
2- Connexion avec Arduino :
- Les capteurs HC-SR04 sont connectés à des broches GPIO (par exemple, broches numériques) de la carte Arduino.
- Le servomoteur est connecté à une broche PWM (Pulse Width Modulation) de la carte Arduino.
3- Programmation Arduino :
- Le code Arduino est écrit pour contrôler le comportement du système.
- Un programme est généralement utilisé pour lire les données des capteurs HC-SR04 pour détecter la distance de l'objet par rapport à chaque capteur.
- En fonction de ces lectures de distance, l'Arduino détermine la direction (droite ou gauche) dans laquelle l'objet se déplace par rapport au système.
- Le servomoteur est alors orienté dans cette direction pour maintenir l'objet au centre du champ de vision du système.
4- Boucle de contrôle :
- Le programme Arduino est généralement organisé dans une boucle continue qui met à jour en permanence les lectures des capteurs et ajuste la position du servomoteur en conséquence.
- La fréquence à laquelle cette boucle est exécutée dépend des exigences de suivi de l'application et des performances du système.
En résumé, le système utilise les informations fournies par les capteurs HC-SR04 pour suivre la position de l'objet en mouvement et ajuste la direction du servomoteur en conséquence pour maintenir l'objet dans le champ de vision du système.
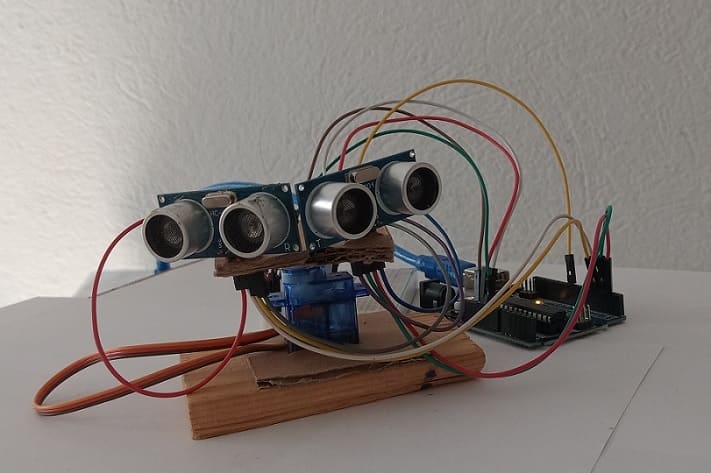
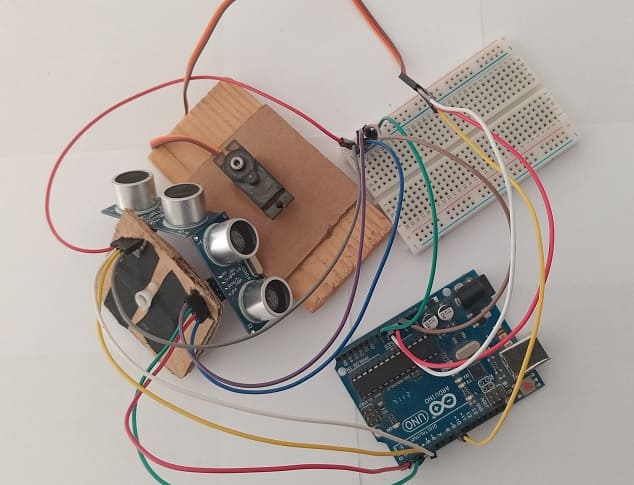
Les composants nécessaires du système
Arduino UNO :

La carte Arduino UNO est l'une des cartes de développement les plus populaires et largement utilisées dans le monde de l'électronique et de la programmation.
Deux Capteurs HC-SR04 :

Le capteur ultrason HC-SR04 est un dispositif électronique utilisé pour mesurer la distance entre le capteur et un objet en utilisant des ondes ultrasonores.
Servomoteur

Le servomoteur joue un rôle crucial dans le système de suivi d'objet en mouvement.
Le servomoteur est attaché au support du capteur à ultrasons. Lorsqu'il reçoit des instructions de la carte Micro:bit, le servomoteur ajuste son angle pour faire pivoter le support du capteur dans une direction spécifique.
Support

Ce support sert à être pivoté dans différentes directions pour suivre l'objet en mouvement.
Fils de connexion :

Pour établir les connexions physiques entre la carte Arduino, les deux capteurs HC-SR04 et le servomoteur
Plaque d'essai (Breadboard) :

On utilise le plaque d'essai pour faciliter le câblage des différents composants.
Schéma de câblage du système
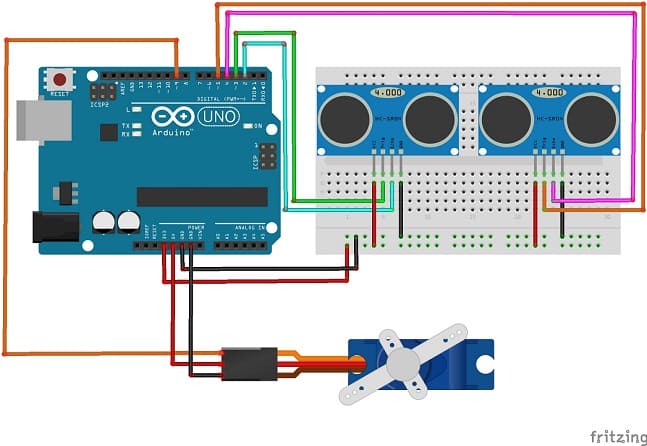
Détails de connexion du premier capteur ultrason HC-SR04
Connecter la broche VCC du capteur HC-SR04 à la broche 3.3V de la carte Arduino.
Connecter la broche GND du capteur HC-SR04 à la broche GND de la carte Arduino.
Connecter la broche Trig du capteur HC-SR04 à la broche N°3 de la carte Arduino.
Connecter la broche Echo du capteur HC-SR04 à la broche N°2 de la carte Arduino.
Détails de connexion du deuxième capteur ultrason HC-SR04
Connecter la broche VCC du capteur HC-SR04 à la broche 3.3V de la carte Arduino.
Connecter la broche GND du capteur HC-SR04 à la broche GND de la carte Arduino.
Connecter la broche Trig du capteur HC-SR04 à la broche N°5 de la carte Arduino.
Connecter la broche Echo du capteur HC-SR04 à la broche N°4 de la carte Arduino.
Détails de connexion du servomoteur
Connecter le fil rouge du servomoteur à la broche 5V de la carte Arduino.
Connecter le fil jaune du servomoteur à la broche N°9 de la carte Arduino.
Connecter le fil marron du servomoteur à la broche GND de la carte Arduino.
Programmer la carte Arduino pour contrôler le système
Voici un exemple de programme Arduino pour contrôler un système de suivi d'objet en mouvement utilisant deux capteurs HC-SR04 et un servomoteur.
Ce code suppose que :
1- les capteurs HC-SR04 sont connectés aux broches numériques (2,3) et (4,5) de l'Arduino et que le servomoteur est connecté à la broche N°9.
2- il contient la bibliothèque Ultrasonic.
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 |
#include <Ultrasonic.h> #include <Servo.h> // Configuration des deux capteurs HC-SR04 Ultrasonic ultrasonic_1(3, 2); // Trig et Echo Ultrasonic ultrasonic_2(5, 4); // Trig et Echo Servo myservo; // create servo object to control a servo int pos_init = 90; // variable to store the servo position void setup() { Serial.begin(9600); myservo.attach(9); // attaches the servo on pin 9 to the servo object myservo.write(90); } void loop() { int distance1 = ultrasonic_1.Ranging(CM); Serial.print("distance1= "); Serial.print(distance1); Serial.println(" cm"); int distance2 = ultrasonic_2.Ranging(CM); Serial.print("distance2= "); Serial.print(distance2); Serial.println(" cm"); if ((distance1 < 4)&&(pos_init<=170)) { // goes from pos_init degrees to pos_init+10 degrees for (int pos = pos_init; pos <= pos_init+10; pos += 1) { // tell servo to go to position in variable 'pos' myservo.write(pos); delay(20); // waits 20ms for the servo to reach the position } pos_init=pos_init+10; } // goes from pos_init degrees to pos_init-10 degrees if ((distance2 < 4)&&(pos_init>=10)) { for (int pos = pos_init; pos >= pos_init-10; pos -= 1) { myservo.write(pos); // tell servo to go to position in variable 'pos' delay(20); // waits 20ms for the servo to reach the position } pos_init=pos_init-10; } delay(500); } |
Assurez-vous de connecter correctement les composants et d'ajuster le code en fonction de votre configuration matérielle spécifique. Ce code mesure les distances à l'aide des capteurs HC-SR04, puis ajuste la position du servomoteur en conséquence pour suivre le mouvement de l'objet détecté.
0 commentaire
laisser un commentaire
Passion de robotique

Tutoriels récents





Atelier robotique

Tutoriels populaires





Construction des robots

Tutoriels plus commentés



Bras robotique

Categories
Maison intelligente






