Système de remplissage d’eau piloté par Arduino
Plan de tutoriel
1- Présentation du système de remplissage d’eau
2- Comment la carte Arduino commande le système de remplissage d'eau ?
3- Matériel nécessaire
4- Montage du système
5- Programmation de la carte Arduino
Présentation du système de remplissage d’eau
Un système de remplissage d’eau est un dispositif automatisé utilisé pour gérer le remplissage de réservoirs, cuves, ou autres contenants avec de l’eau, en contrôlant le niveau et en prévenant les débordements.
Principe de Fonctionnement
Étape 1 : Détection du niveau bas
Si le niveau d’eau est détecté comme bas par le capteur, le contrôleur électronique active la pompe ou ouvre la vanne.
Étape 2 : Remplissage
L’eau est pompée ou acheminée vers le réservoir.
Étape 3 : Détection du niveau haut
Lorsque le capteur de niveau haut détecte que le réservoir est plein, le contrôleur arrête la pompe ou ferme la vanne.
Cycle continu :
Ce processus se répète automatiquement à chaque baisse du niveau d'eau.
Applications
Usage domestique : Remplissage automatique de réservoirs d’eau pour la maison.
Agriculture : Irrigation automatisée en fonction des besoins.
Industriel : Systèmes de refroidissement ou stockage d'eau.
Stations de lavage : Contrôle des niveaux d'eau dans des bassins.
Avantages
Économie d'eau : Pas de débordement.
Pratique : Fonctionnement automatique sans intervention humaine.
Personnalisable : Peut être adapté pour diverses applications.
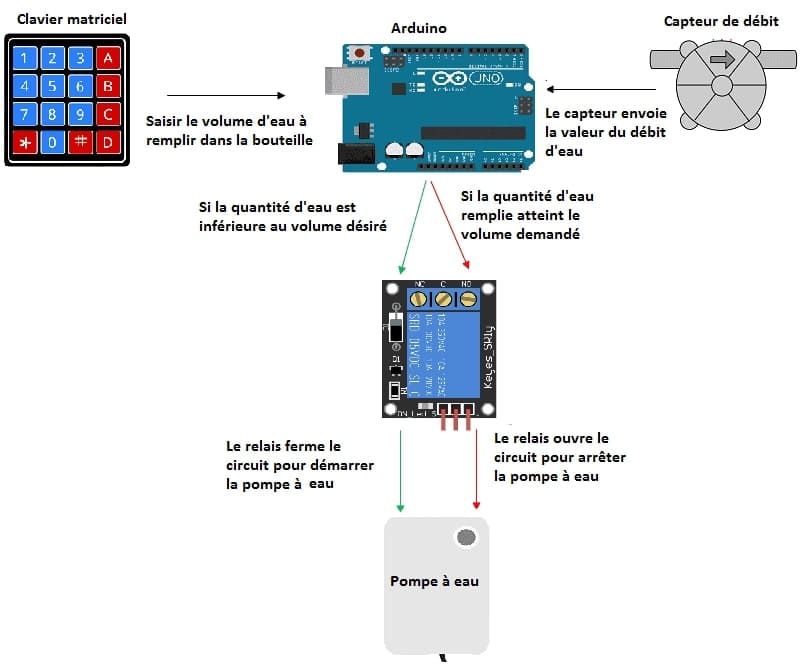
Comment la carte Arduino commande le système de remplissage d'eau ?
Le commandement de la carte Arduino dans un système de remplissage d'eau utilisant un clavier 4x4, un afficheur LCD I2C 16x2, un capteur de débit YF-S401 et une pompe à eau 12V est un système interactif et automatisé permettant un contrôle précis du remplissage d’eau. Voici une description détaillée du fonctionnement de ce système :
1- Principe Général
La carte Arduino joue le rôle de contrôleur central en intégrant les éléments suivants :
Saisie des paramètres utilisateur via le clavier 4x4 (comme la quantité d'eau à remplir).
Affichage en temps réel des informations sur le remplissage grâce à l'écran LCD I2C.
Mesure précise du débit d'eau grâce au capteur de débit YF-S401.
Commande de la pompe pour réguler l'écoulement d'eau en fonction des paramètres définis par l'utilisateur.
Fonctionnement du Système
Étape 1 : Entrée des Paramètres
1- L'utilisateur entre la quantité d'eau souhaitée (en litres ou millilitres) via le clavier 4x4.
2- L’Arduino enregistre cette valeur et l'affiche sur l’écran LCD.
Étape 2 : Activation de la Pompe
1- Une fois la quantité saisie, l'utilisateur appuie sur une touche pour démarrer le processus.
2- L'Arduino active le relais pour démarrer la pompe 12V.
Étape 3 : Mesure et Contrôle
1- Le capteur YF-S401 mesure le débit en temps réel et transmet les impulsions à l'Arduino.
2- L'Arduino calcule la quantité totale d’eau écoulée en fonction des impulsions : Volume d’eau = (Nombre d’impulsions) × (Facteur de conversion du capteur).
3- L’écran LCD affiche la quantité d’eau restante à remplir.
Étape 4 : Arrêt Automatique
1- Lorsque la quantité définie est atteinte, l’Arduino désactive le relais pour arrêter la pompe.
2- L’écran LCD affiche un message indiquant que le remplissage est terminé.
Étape 5 : Réinitialisation
L'utilisateur peut réinitialiser le système pour une nouvelle opération via le clavier.
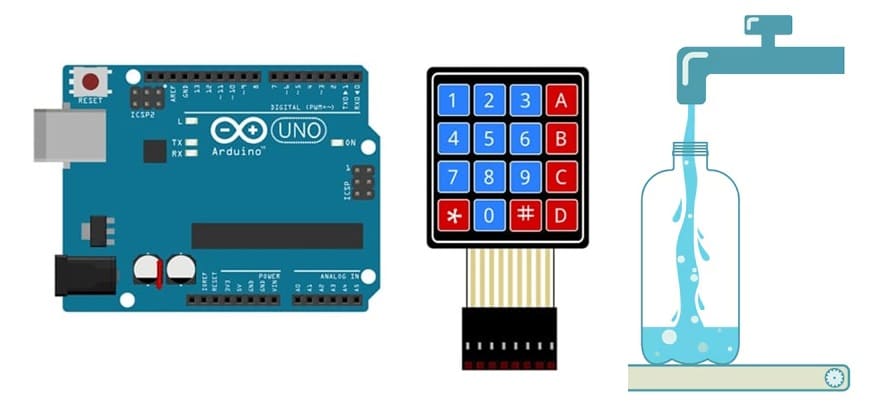
Matériel nécessaire
Carte Arduino UNO

La carte Arduino est le microcontrôleur qui gère l'ensemble du système.
Clavier 4x4
Utilisé pour entrer des paramètres tels que la quantité d’eau à remplir (en litres ou en millilitres).
Chaque touche correspond à un chiffre ou une commande spécifique (par exemple, démarrer, arrêter, effacer).
Afficheur LCD I2C 16x2
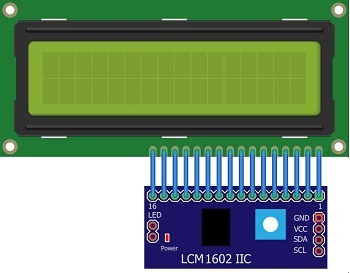
Affiche les informations essentielles : la quantité d'eau restante à remplir et le débit d’eau en temps réel.
Capteur de débit YF-S401

Mesure le débit d'eau (litres par minute) en comptant les impulsions générées par l'eau passant dans le capteur.
Chaque impulsion correspond à un volume d'eau précis (selon les spécifications du capteur).
Permet à l'Arduino de calculer la quantité d'eau délivrée et de comparer avec la valeur cible.
Pompe à eau 12V

Commandée via un relais.
Active ou désactive l’écoulement de l’eau selon les données du capteur et les paramètres définis.
Module relais

Permet de commuter la pompe en toute sécurité (gérer les tensions et courants plus élevés).
Fils de connexion :

Pour relier les différents composants du système.
Plaque d'essai (Breadboard) :

On utilise la plaque d'essai pour faciliter le câblage des différents composants.
Batterie 9V:

Elle est une source d’alimentation pour le système.
Montage du système
1- Schéma de câblage de la carte Arduino avec la pompe à eau et du capteur de débit d’eau:
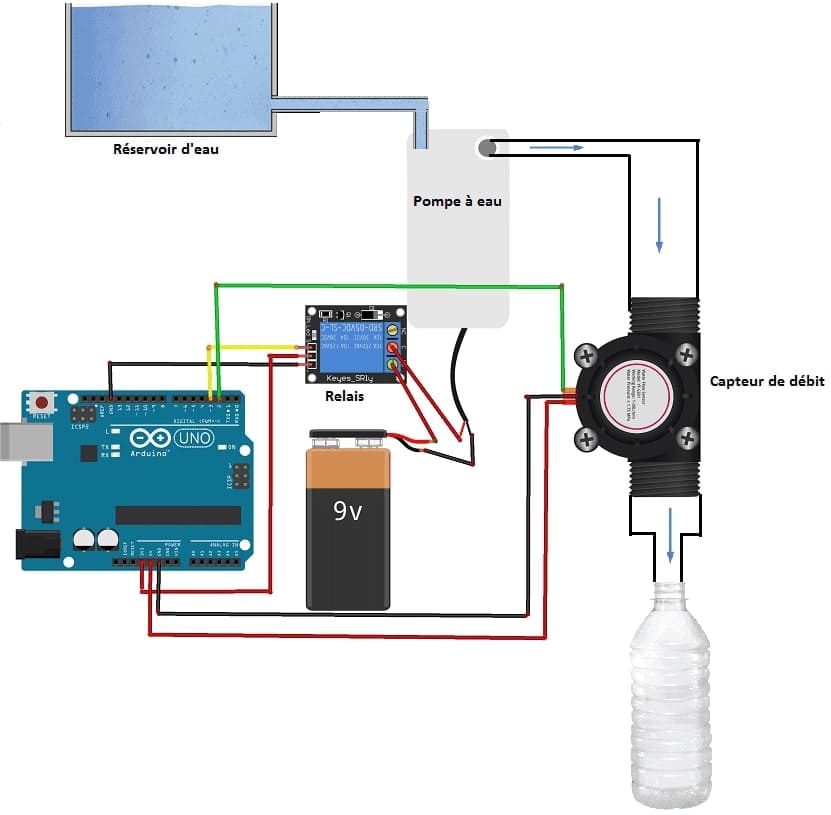
Capteur de débit YF-S401
Le capteur comporte trois fils :
Rouge (VCC) : Connecté au 5V de l'Arduino.
Noir (GND) : Connecté au GND de l'Arduino.
Jaune (Signal) : Connecté à une broche numérique (par ex., D2).
d. Module Relais
Le relais contrôle la pompe. Il a plusieurs bornes :
Signal (IN) : Connecté à une broche numérique (par ex., D3) de l'Arduino.
VCC : Connecté au 5V de l'Arduino.
GND : Connecté au GND de l'Arduino.
La partie puissance du relais est connectée à la pompe :
NO (Normally Open) : Connecté à la borne positive de la pompe.
NO(Common) : Connecté à la borne positive de l'alimentation 9V.
GND de la pompe : Directement relié à la borne négative de l'alimentation 9V.
e. Pompe à eau 12V
+ : Connecté au COM du relais.
- : Connecté au GND de l'alimentation 9V.
2- Schéma de câblage de la carte Arduino avec le clavier matriciel 4x4:
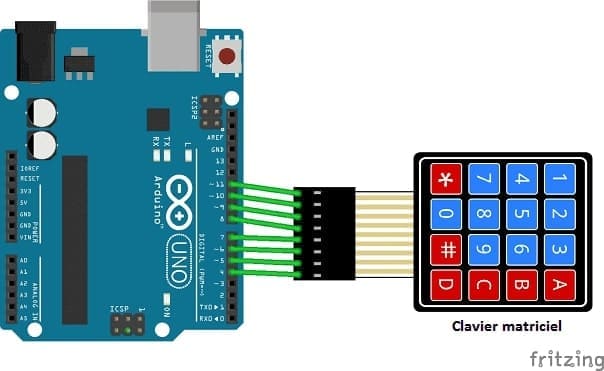
Le clavier est connecté à l'Arduino via 8 broches numériques :
Colonnes (4) : Connectées à 4 broches numériques (par ex., D4 à D7).
Lignes (4) : Connectées à 4 autres broches numériques (par ex., D8 à D11).
3- Schéma de câblage de la carte Arduino avec l'afficheur LCD I2C 16x2
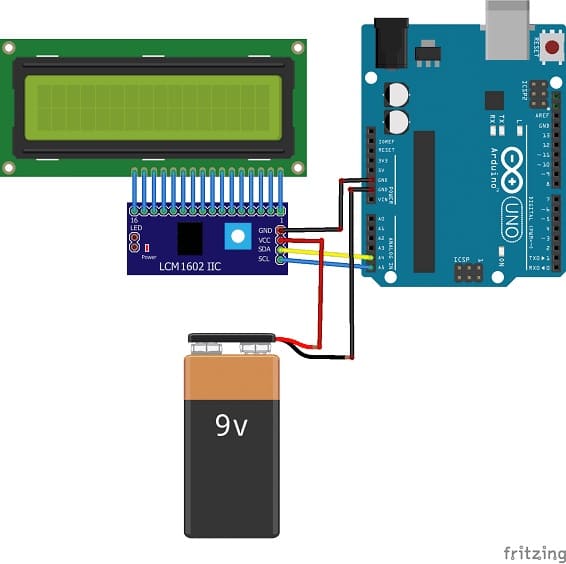
Afficheur LCD I2C 16x2
L'adaptateur I2C réduit les connexions nécessaires au LCD. Seules 4 broches sont utilisées :
SDA : Connecté à A4 (ou SDA selon votre Arduino).
SCL : Connecté à A5 (ou SCL selon votre Arduino).
VCC : Connecté au 5V de l'Arduino.
GND : Connecté au GND de l'Arduino.
Programmation de la carte Arduino
Voici le programme qui permet de commander le remplissage de la bouteille par la carte Arduino et le clavier matriciel 4x4.
Il faut télécharger ces deux bibliothèques : LiquidCrystal_I2C et keypad
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 |
#include <Keypad.h> #include <LiquidCrystal_I2C.h> const int ROW_NUM = 4; //four rows const int COLUMN_NUM = 4; //four columns char keys[ROW_NUM][COLUMN_NUM] = { {'1','2','3', 'A'}, {'4','5','6', 'B'}, {'7','8','9', 'C'}, {'*','0','#', 'D'} }; LiquidCrystal_I2C lcd(0x27, 20, 4); // ligne 8 byte pin_rows[ROW_NUM] = {11, 10, 9, 8}; //connect to the row pinouts of the keypad byte pin_column[COLUMN_NUM] = {7, 6, 5, 4}; //connect to the column pinouts of the keypad Keypad keypad = Keypad( makeKeymap(keys), pin_rows, pin_column, ROW_NUM, COLUMN_NUM ); int sensorInterrupt = 0; // interrupt 0 int sensorPin = 2; //Digital Pin 2 int solenoidValve = 5; // Digital pin 5 unsigned int SetPoint = 400; //400 milileter String code=""; /*The hall-effect flow sensor outputs pulses per second per litre/minute of flow.*/ float calibrationFactor = 90; //You can change according to your datasheet volatile byte pulseCount =0; float flowRate = 0.0; unsigned int flowMilliLitres =0; unsigned long totalMilliLitres = 0,volume=0; unsigned long oldTime ; const int relais_moteur = 3; // // le relais est connecté à la broche 1 de la carte Adruino void setup() { totalMilliLitres = 0; pinMode(relais_moteur, OUTPUT); lcd.init(); // initialisation de l’afficheur lcd.clear(); lcd.backlight(); // active le rétro-éclairage lcd.setCursor(0, 0); // se positionner à la première ligne lcd.print("donner volume:"); // Afficher le mot ‘carte’ // Initialize a serial connection for reporting values to the host Serial.begin(9600); pinMode(solenoidValve , OUTPUT); digitalWrite(solenoidValve, HIGH); pinMode(sensorPin, INPUT); digitalWrite(sensorPin, HIGH); /*The Hall-effect sensor is connected to pin 2 which uses interrupt 0. Configured to trigger on a FALLING state change (transition from HIGH (state to LOW state)*/ attachInterrupt(sensorInterrupt, pulseCounter, FALLING); //you can use Rising or Falling } void loop() { char key = keypad.getKey(); //lcd.clear(); if(key) // On appuie sur une touche du clavier { code+=key; lcd.setCursor(0, 1); // se positionner à la première ligne lcd.print(code); // Afficher le mot ‘carte’ delay(100); } if (key=='D') { // si on appuie sur la touche 'D' if(code.toInt()<=1500){ volume=code.toInt(); } else{ lcd.clear(); lcd.backlight(); // active le rétro-éclairage lcd.setCursor(0, 0); // se positionner à la première ligne lcd.print("donner volume:"); // Afficher le mot ‘carte’ } code=""; } if (totalMilliLitres<volume) { digitalWrite(relais_moteur, HIGH); // On demarre la pompe à eau if((millis() - oldTime) > 1000) // Only process counters once per second { // Disable the interrupt while calculating flow rate and sending the value to the host detachInterrupt(sensorInterrupt); // Because this loop may not complete in exactly 1 second intervals we calculate the number of milliseconds that have passed since the last execution and use that to scale the output. We also apply the calibrationFactor to scale the output based on the number of pulses per second per units of measure (litres/minute in this case) coming from the sensor. flowRate = ((1000.0 / (millis() - oldTime)) * pulseCount) / calibrationFactor; // Note the time this processing pass was executed. Note that because we've // disabled interrupts the millis() function won't actually be incrementing right // at this point, but it will still return the value it was set to just before // interrupts went away. oldTime = millis(); // Divide the flow rate in litres/minute by 60 to determine how many litres have // passed through the sensor in this 1 second interval, then multiply by 1000 to // convert to millilitres. flowMilliLitres = (flowRate / 60) * 1000; // Add the millilitres passed in this second to the cumulative total totalMilliLitres += flowMilliLitres; unsigned int frac; // Print the flow rate for this second in litres / minute Serial.print("Flow rate: "); Serial.print(flowMilliLitres, DEC); // Print the integer part of the variable Serial.print("mL/Second"); Serial.print("\t"); lcd.clear(); lcd.backlight(); // active le rétro-éclairage lcd.setCursor(0, 0); // se positionner à la première ligne lcd.print("debit:"); lcd.print(flowMilliLitres); // Afficher le debit sur l'afficheur lcd lcd.print(" ml/s"); // Print the cumulative total of litres flowed since starting Serial.print("Output Liquid Quantity: "); Serial.print(totalMilliLitres,DEC); Serial.println("mL"); Serial.print("\t"); lcd.setCursor(0, 1); // se positionner à la première ligne lcd.print("volume:"); // Afficher le mot ‘carte’ lcd.print(totalMilliLitres); // Afficher la quantite remplie lcd.print(" ml"); if (totalMilliLitres > 40) { SetSolinoidValve(); } // Reset the pulse counter so we can start incrementing again pulseCount = 0; // Enable the interrupt again now that we've finished sending output attachInterrupt(sensorInterrupt, pulseCounter, FALLING); } }else { digitalWrite(relais_moteur, LOW); // On arrete la pompe a eau volume=0; } } //Insterrupt Service Routine void pulseCounter() { // Increment the pulse counter pulseCount++; } void SetSolinoidValve() { digitalWrite(solenoidValve, LOW); } |
0 commentaire
laisser un commentaire
Passion de robotique

Tutoriels récents





Atelier robotique

Tutoriels populaires





Construction des robots

Tutoriels plus commentés




Bras robotique

Categories
Maison intelligente