Système de détection d’obstacles basé sur HC-SR04 et Micro:bit
Plan du tutoriel
Introduction
1- Principe du système de détection d’obstacles basé sur HC-SR04 et Micro:bit
2- Les composants nécessaires du système
3- Schéma de câblage du système de détection d'obstacles
4- Programmation de la carte Micro:bit pour contrôler le système
Introduction
Un système de détection d'obstacles est une technologie conçue pour identifier et localiser des objets ou des obstacles dans un environnement donné. Ces systèmes sont couramment utilisés dans divers domaines tels que l'automobile, la robotique, la surveillance, les drones, etc. Voici quelques éléments clés liés aux systèmes de détection d'obstacles :
1- Capteurs :
Capteurs ultrasoniques : Mesurent la distance en utilisant des ondes sonores.
Capteurs infrarouges : Détectent la chaleur émise par les objets.
Caméras : Captent des images vidéo pour l'analyse d'images.
Lidar (Light Detection and Ranging) : Utilise des lasers pour mesurer la distance et créer une carte 3D de l'environnement.
Radar : Utilise des ondes radio pour détecter la présence et la distance des objets.
2- Traitement des données :
Les données des capteurs sont traitées pour extraire des informations pertinentes sur la position, la taille et la nature des obstacles.
Des algorithmes de traitement du signal, de vision par ordinateur et d'apprentissage automatique peuvent être utilisés pour améliorer la précision de la détection.
3- Algorithme de détection :
Les algorithmes de détection d'obstacles peuvent varier en fonction du type de capteurs utilisés et des exigences spécifiques du système.
Les approches peuvent inclure des seuils de détection, des modèles prédictifs, des réseaux de neurones, etc.
4- Système d'alerte :
Une fois un obstacle détecté, le système peut déclencher des alertes visuelles, sonores ou haptiques pour avertir l'utilisateur ou activer des systèmes d'évitement automatique.
5- Applications :
Les systèmes de détection d'obstacles sont largement utilisés dans les voitures autonomes pour éviter les collisions.
Ils sont également présents dans les robots industriels pour assurer un mouvement sécurisé.
Les drones utilisent ces systèmes pour éviter les collisions avec des objets fixes ou mobiles.
6- Limitations :
Les conditions météorologiques, l'éclairage et d'autres facteurs environnementaux peuvent influencer les performances des capteurs.
Certains obstacles peuvent ne pas être détectés en raison de leur taille, de leur matériau ou d'autres caractéristiques spécifiques.
En résumé, les systèmes de détection d'obstacles jouent un rôle crucial dans la sécurité et la navigation des véhicules autonomes, des robots et d'autres dispositifs autonomes, en contribuant à prévenir les accidents et à assurer un déplacement sûr dans divers environnements.
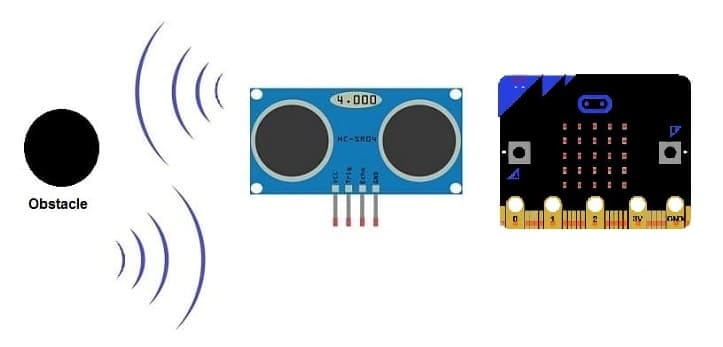
Principe du système de détection d’obstacles basé sur HC-SR04 et Micro:bit
Le système de détection d'obstacles basé sur le capteur ultrasonique HC-SR04 et la carte Micro:bit repose sur le principe de l'écholocation. Le capteur HC-SR04 utilise des ondes ultrasonores pour mesurer la distance entre le capteur et un objet. Voici le principe de fonctionnement en quelques étapes :
1- Émission d'ultrasons : Le capteur HC-SR04 émet une impulsion ultrasonique en envoyant un signal à la broche de déclenchement (Trig).
2- Réflexion sur l'objet : Les ondes ultrasoniques se propagent jusqu'à ce qu'elles rencontrent un objet solide, où elles sont réfléchies.
3- Réception de l'écho : L'écho de l'onde réfléchie est détecté par le capteur sur la broche d'écho (Echo).
4- Calcul de la distance : La distance entre le capteur et l'objet est calculée en utilisant la durée entre l'émission du signal et la réception de l'écho.
5- Prise de décision : En fonction de la distance mesurée, le programme Makecode pour Micro:bit prend des décisions. Si la distance est inférieure à une valeur seuil prédéfinie, cela indique la présence d'un obstacle.
6- Activation de la LED et du buzzer : Si un obstacle est détecté, la LED peut être allumée pour signaler visuellement la présence de l'obstacle, et le buzzer peut émettre un son d'avertissement.
Les composants nécessaires du système
Carte Micro:bit
La carte Micro:bit est un petit ordinateur programmable conçu pour l'éducation des enfants et des débutants en informatique. Elle a été développée par la BBC au Royaume-Uni en 2015 dans le but d'encourager l'apprentissage de la programmation et de l'électronique.
Carte d'extension pour Micro:bit

Pour étendre les fonctionnalités de la carte Micro:bit, vous pouvez utiliser une carte d'extension, également appelée "shield", conçue spécifiquement pour Micro:bit. Ces cartes d'extension offrent des connecteurs supplémentaires, des composants intégrés et des fonctionnalités supplémentaires pour faciliter l'ajout de capteurs, d'actionneurs et d'autres modules électroniques.
Capteur HC-SR04 :

Le capteur ultrason HC-SR04 est un dispositif électronique utilisé pour mesurer la distance entre le capteur et un objet en utilisant des ondes ultrasonores.
LED
![]()
L'utilisation d'une LED dans un système de détection d'obstacles peut fournir un indicateur visuel lorsque le capteur détecte la proximité d'un objet.
Résistance
![]()
Lorsque vous utilisez une LED dans un circuit, il est généralement nécessaire d'ajouter une résistance en série avec la LED pour limiter le courant qui la traverse. Cela protège la LED et évite qu'elle ne soit endommagée en raison d'un courant excessif.
Fils de connexion :

Pour établir les connexions physiques entre la carte Micro:bit et le capteur HC-SR04 Assurez-vous d'avoir des fils de bonne qualité pour des connexions stables.
Plaque d'essai (Breadboard) :

On utilise le plaque d'essai pour faciliter le câblage des différents composants.
Schéma de câblage du système de détection d'obstacles 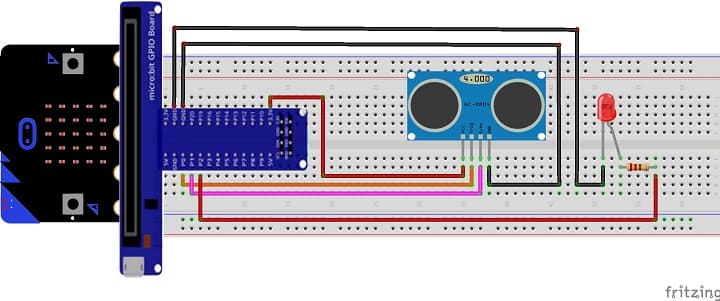
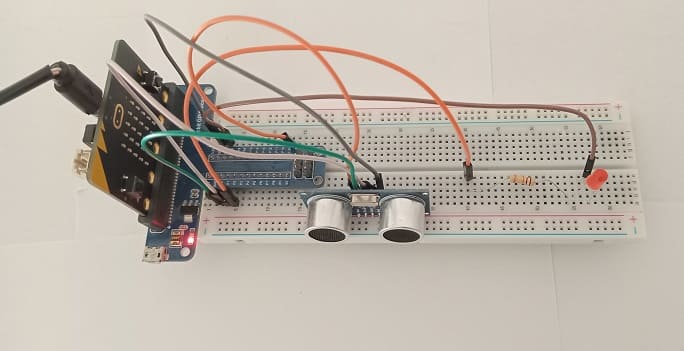
1- Connexion du capteur HC-SR04 à la carte Micro:bit
Connecter la broche VCC du capteur HC-SR04 à la broche 3.3V de la carte Micro:bit.
Connecter la broche GND du capteur HC-SR04 à la broche GND de la carte Micro:bit.
Connecter la broche Trig du capteur HC-SR04 à la broche P0 de la carte Micro:bit.
Connecter la broche Echo du capteur HC-SR04 à la broche P1 de la carte Micro:bit.
2- Connexion de la LED à la carte Micro:bit
Connectez une résistance en série avec la LED: La résistance est connectée entre la broche P2 et la borne positive (anode) de la LED.
Connectez la borne négative (cathode) de chaque LED à la masse (GND) de la carte Micro:bit.
Programmation de la carte Micro:bit pour contrôler le système
Le programme Makecode est écrit pour définir le comportement du système en fonction des données du capteur. Il configure les broches Trig et Echo, mesure le temps entre l'émission et la réception du signal, calcule la distance et prend des décisions en fonction de cette distance.
Suivez ces étapes pour ajouter le code nécessaire :
1- Ouvrez l'éditeur MakeCode pour Micro:bit sur le site https://makecode.microbit.org/.
2- Créez un nouveau projet.
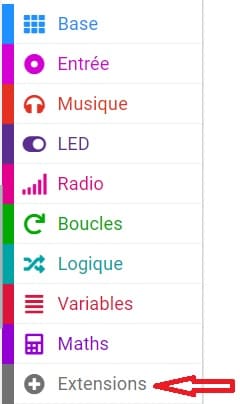
3- Cliquez sur "Extensions" dans le coin inférieur gauche.
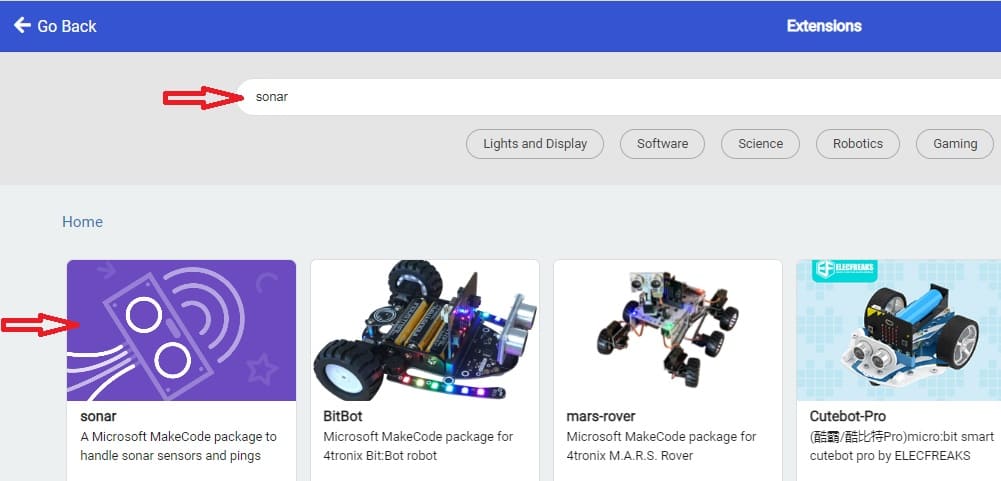
4- Rechercher et ajouter l'extension "sonar"
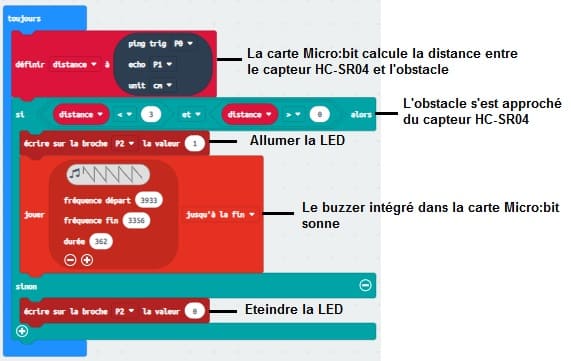
5- Maintenant, vous pouvez insérer ce programme avec Makecode :
0 commentaire
laisser un commentaire
Passion de robotique

Tutoriels récents





Atelier robotique

Tutoriels populaires





Construction des robots

Tutoriels plus commentés



Bras robotique

Categories
Maison intelligente