Robot voiture contrôlé par Arduino et télécommande
Plan de tutoriel
1- Qu'est ce qu'un robot voiture télécommandé ?
2- Fonctionnement du robot voiture télécommandé commandé par Arduino
3- Composants principaux du robot
4- Schéma du câblage du robot
5- Programmation de la carte Arduino UNO
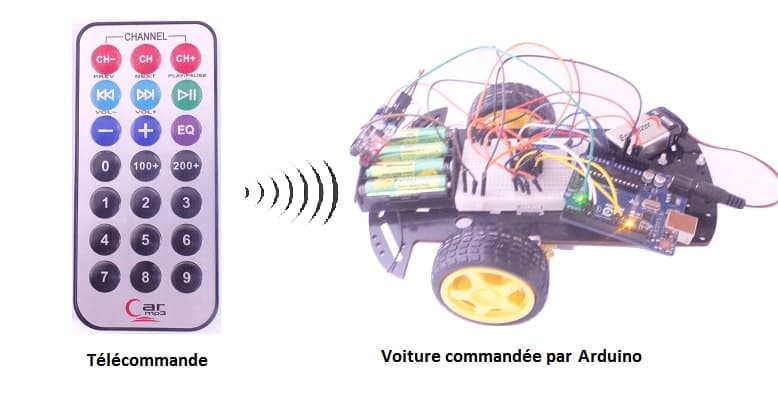
Qu'est ce qu'un robot voiture télécommandé ?
Un robot voiture télécommandé est un dispositif combinant les principes d'un véhicule télécommandé et ceux d'un robot. Ce type de robot peut être contrôlé à distance ou programmé pour exécuter des tâches autonomes. Voici une description détaillée :
Composantes principales :
Châssis : La structure principale, souvent équipée de roues ou de chenilles pour permettre les déplacements.
Système de propulsion : Habituellement constitué de moteurs électriques reliés aux roues pour le mouvement.
Télécommande : Une unité (souvent sans fil, comme un contrôleur radio ou une application mobile) qui permet à l'utilisateur de diriger le robot en temps réel.
Unités de contrôle :
Manuel : Utilisation d'une télécommande pour piloter directement.
Autonome : Le robot est équipé de microcontrôleurs (comme Arduino ou Raspberry Pi) et de capteurs pour prendre des décisions basées sur l'environnement.
Capteurs (optionnel) : Ces capteurs permettent au robot d'interagir avec son environnement. Ils peuvent inclure :
Capteurs de distance (ultrasoniques ou infrarouges) pour éviter les obstacles.
Caméras pour la vision par ordinateur.
Capteurs de ligne pour suivre des trajectoires tracées au sol.
Batteries : Une source d'alimentation pour les moteurs et l'électronique.
Fonctionnement du robot voiture télécommandé commandé par Arduino
Le fonctionnement d’un robot voiture télécommandé à deux roues, utilisant une carte Arduino, un capteur KY-032, une télécommande infrarouge (pour le contrôle manuel), et un SN754410 (pont en H pour les moteurs), repose sur une combinaison de contrôle manuel (via la télécommande) et automatique (avec le capteur KY-032)
Voici une description étape par étape du fonctionnement:
1- Lorsque l’utilisateur appuie sur un bouton de la télécommande, le signal infrarouge est reçu par le module récepteur.
2- L’Arduino décode ce signal pour identifier quelle commande est envoyée (par exemple, avancer, reculer, tourner à gauche/droite).
3- En fonction de la commande, l’Arduino envoie des signaux au SN754410 pour actionner les moteurs :
Avancer : Les deux moteurs tournent dans le même sens.
Reculer : Les deux moteurs tournent en sens inverse.
Tourner : Un moteur avance pendant que l’autre recule.
Composants principaux du robot
Arduino :

La carte microcontrôleur qui contrôle l’ensemble du système.
Kit robot :

a- Deux roues motrices et un châssis : Les roues sont reliées à des moteurs à courant continu (DC motors) pour le déplacement.
b- Roulette omnidirectionnelle Fournit de la stabilité au châssis à l’avant ou à l’arrière.
SN754410 (pont en H) :

Un circuit intégré qui permet de contrôler les moteurs, leur sens de rotation (avant/arrière) et leur vitesse.
Télécommande infrarouge :

Permet à l’utilisateur de contrôler manuellement le robot.
KY-032 :

Un capteur infrarouge qui détecte les signaux infrarouges émis par une télécommande.
Batterie 4xAA :
Pour alimenter le SN754410 et les moteurs.
Batterie de 9V

Pour alimenter l’Arduino UNO
Fils de connexion :

Des fils électriques et des connecteurs seront nécessaires pour relier les différents composants entre eux et à la carte Arduino UNO.
Plaque d'essai (Breadboard) :

On utilise la plaque d'essai pour faciliter le câblage des différents composants.
Schéma du câblage du robot
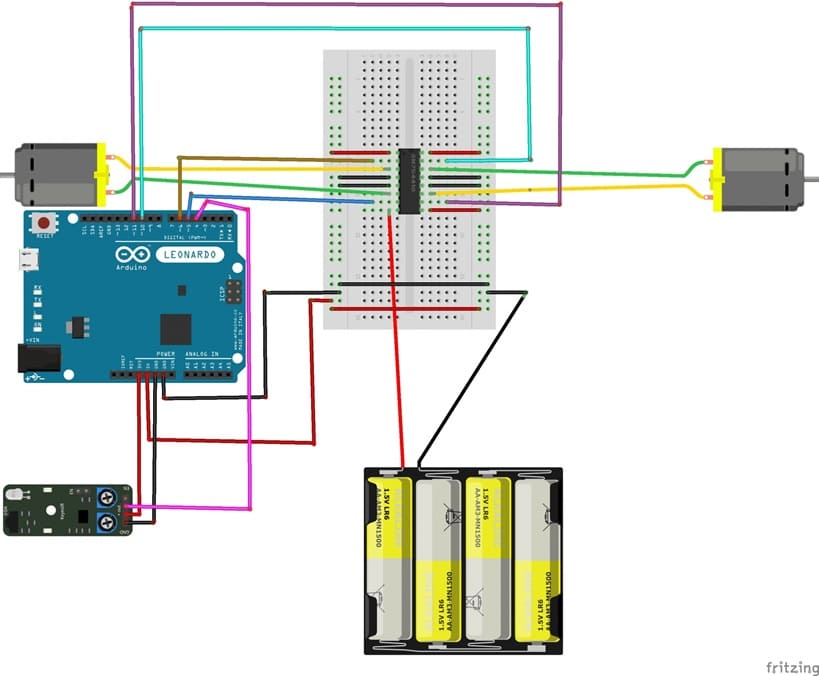
1- SN754410 :
Reliez les broches de contrôle du SN754410 à l’Arduino :
Broches numériques 10, 11 pour le moteur gauche.
Broches numériques 5, 6 pour le moteur droit.
Alimentez le SN754410 via :
VCC1 (5V depuis l’Arduino).
VCC2 (alimentation des moteurs).
2- KY-032 (Récepteur infrarouge) :
VCC : 3.3V de l’Arduino.
GND : Masse commune.
OUT : Broche numérique (ex. 4).
Programmation de la carte Arduino UNO
Voici le code nécessaire pour la carte Arduino pour orchestrer le contrôle des moteurs, capteurs et signaux de la télécommande.
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 |
#include <IRremote.h> int RECV_PIN = 4; IRrecv irrecv(RECV_PIN); decode_results results; int GA=11,GB=10,DA=5,DB=6; //initialisation des pins (GA & GB pour le moteur gauche / DA & DB pour le moteur droite) void setup() { irrecv.enableIRIn(); // Initialise le recepteur infrarouge pinMode(DA,OUTPUT); pinMode(DB,OUTPUT); pinMode(GA,OUTPUT); pinMode(GB,OUTPUT); } /*******************************/ /***Les Fonctions***/ void ar() //direction arriére { digitalWrite(DA,HIGH); digitalWrite(DB,LOW); digitalWrite(GA,HIGH); digitalWrite(GB,LOW); } void av() //direction avant { digitalWrite(DA,LOW); digitalWrite(DB,HIGH); digitalWrite(GA,LOW); digitalWrite(GB,HIGH); } void d()//direction droite { digitalWrite(DA,LOW); digitalWrite(DB,HIGH); digitalWrite(GA,HIGH); digitalWrite(GB,LOW); } void g()//direction gauche { digitalWrite(DA,HIGH); digitalWrite(DB,LOW); digitalWrite(GA,LOW); digitalWrite(GB,HIGH); } void s()//arrêt de la voiture { digitalWrite(DA,LOW); digitalWrite(DB,LOW); digitalWrite(GA,LOW); digitalWrite(GB,LOW); } /*****************************/ void loop() {if (irrecv.decode(&results)) { if (results.value==0xFF18E7)//on appuie sur la touche 2 av(); // la voiture avance if (results.value==0xFF5AA5)//on appuie sur la touche 6 d(); // la voiture tourne à droite if (results.value==0xFF10EF)//on appuie sur la touche 4 g(); // la voiture tourne à gauche if (results.value==0xFF4AB5)//on appuie sur la touche 8 ar(); // la voiture recule if (results.value==0xFF38C7)// appuie sur la touche 5 s();// la voiture s'arrête irrecv.resume(); // Recoit la valeur suivante } } |
0 commentaire
laisser un commentaire
Passion de robotique

Tutoriels récents





Atelier robotique

Tutoriels populaires





Construction des robots

Tutoriels plus commentés




Bras robotique

Categories
Maison intelligente






