Robot suiveur d’objet basé sur la carte Micro:bit et le capteur HC-SR04
Plan de tutoriel
1- Qu'est ce qu'un robot suiveur d'objets ?
2- Fonctionnement du Robot suiveur d'objet commandé par la carte Micro:bit
3- Les composants du robot
4- Montage du robot
5- Programmation de la carte Micro:bit avec Makecode
Qu'est ce qu'un robot suiveur d'objets ?
Un robot suiveur d'objet est un type de robot conçu pour détecter et suivre un objet spécifique en mouvement dans son environnement. Ces robots utilisent généralement des capteurs tels que des caméras, des capteurs de distance ou des capteurs de mouvement pour repérer l'objet cible. Une fois que l'objet est détecté, le robot utilise des algorithmes de traitement d'image ou de traitement du signal pour suivre sa trajectoire et ajuster ses propres mouvements afin de rester en synchronisation avec lui.
Les applications des robots suiveurs d'objets sont diverses, allant de la surveillance et de la sécurité à la logistique et à la robotique domestique. Par exemple, ces robots peuvent être utilisés dans les entrepôts pour suivre et déplacer des articles, dans les musées pour guider les visiteurs vers des expositions spécifiques, ou même dans les maisons pour aider à surveiller les personnes âgées ou les enfants.
Le fonctionnement d'un robot suiveur d'objet repose sur plusieurs étapes :
1- Détection de l'objet : Le robot utilise des capteurs tels que des caméras, des capteurs de distance ou des capteurs de mouvement pour détecter la présence et la position de l'objet dans son environnement. Cette étape peut impliquer le traitement d'images ou de données provenant des capteurs pour identifier l'objet cible.
2- Suivi de l'objet : Une fois que l'objet est détecté, le robot utilise des algorithmes pour suivre sa trajectoire. Cela implique généralement d'analyser en continu les données des capteurs pour estimer la vitesse et la direction de l'objet, ainsi que pour prédire sa future position.
3- Contrôle des mouvements : Sur la base des informations obtenues lors du suivi de l'objet, le robot ajuste ses propres mouvements pour rester en synchronisation avec lui. Cela peut impliquer le contrôle des moteurs ou des actionneurs du robot pour changer sa vitesse, sa direction et son orientation.
4- Correction des erreurs : Tout au long du processus, le robot peut rencontrer des erreurs de détection ou de suivi. Pour y remédier, il peut utiliser des techniques telles que la rétroaction visuelle ou la fusion de données provenant de différents capteurs pour améliorer la précision de sa trajectoire.
5- Adaptation aux changements : Les robots suiveurs d'objets doivent également être capables de s'adapter aux changements dans leur environnement, tels que les obstacles imprévus ou les modifications dans la trajectoire de l'objet cible. Cela peut nécessiter une capacité d'apprentissage ou d'ajustement dynamique des algorithmes de suivi.
En combinant ces étapes, un robot suiveur d'objet peut suivre efficacement un objet en mouvement dans divers environnements et situations.
Fonctionnement du Robot suiveur d'objet commandé par la carte Micro:bit
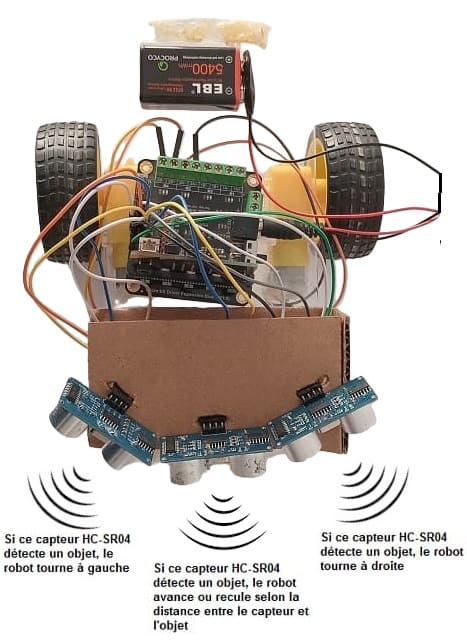
Le robot suiveur d'objets utilise les capteurs à ultrasons HC-SR04 pour détecter les objets devant lui. La carte Micro:bit analyse les données des capteurs et prend des décisions en fonction des informations reçues. La carte pilote de moteur contrôle les moteurs du robot, lui permettant de se déplacer dans différentes directions.
Détection des obstacles : Les capteurs HC-SR04 émettent des ondes ultrasonores et mesurent le temps nécessaire à ces ondes pour rebondir sur un objet et revenir au capteur. En utilisant cette information, le robot peut déterminer la distance entre lui-même et l'obstacle le plus proche dans sa direction de déplacement.
Prise de décision : En fonction des données des capteurs, le robot décide de sa prochaine action. S'il détecte un objet directement devant lui, il le suit . Cette décision est prise en fonction de la comparaison des distances mesurées par les capteurs dans différentes directions.
Contrôle des moteurs : Une fois la décision prise, la carte Micro:bit envoie des signaux à la carte pilote de moteur pour contrôler les moteurs du robot. Par exemple, si le robot doit tourner à droite pour suivre un objet à sa droite, la carte Micro:bit enverra des signaux à la carte pilote pour activer le moteur droit et désactiver le moteur gauche pendant un certain temps, ce qui entraînera une rotation du robot vers la droite.
Boucle de contrôle : Ce processus de détection d'objet, de prise de décision et de contrôle des moteurs se répète en boucle continue, permettant au robot de se déplacer de manière autonome tout en suivant les objets.
En combinant ces composants et en les programmant de manière appropriée, vous pouvez créer un robot suiveur d'objets capable de naviguer dans son environnement en suivant les objets. Ce projet offre une excellente opportunité d'apprentissage pratique dans les domaines de la robotique, de la programmation et de l'électronique.
Les composants du robot
Carte Micro:bit
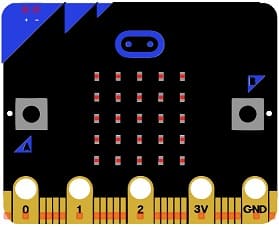
La carte Micro:bit est un petit ordinateur programmable conçu pour l'éducation des enfants et des débutants en informatique. Elle a été développée par la BBC au Royaume-Uni en 2015 dans le but d'encourager l'apprentissage de la programmation et de l'électronique.
Carte DRIVER EXPANSION pour Micro:bit
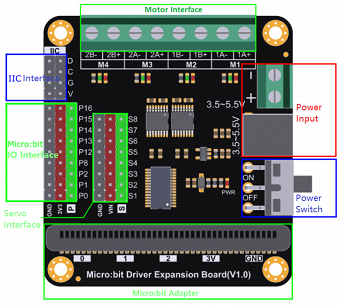
La Carte DRIVER EXPANSION pour Micro:bit est une carte d'extension conçue pour être utilisée avec la carte Micro:bit afin d'ajouter des fonctionnalités supplémentaires, notamment le contrôle de moteurs.
Trois Capteurs HC-SR04 :

Le capteur ultrason HC-SR04 est un dispositif électronique utilisé pour mesurer la distance entre le capteur et un objet en utilisant des ondes ultrasonores.
Batterie de 9V

Une batterie de 9 volts est une pile qui fournit une tension de sortie de 9 volts au robot
Fils de connexion

Les fils de connexion sont des fils électriques utilisés pour connecter des composants électroniques à une carte Micro:bit. Ils sont généralement utilisés pour connecter des capteurs, des actionneurs, des afficheurs et d'autres composants à la carte Micro:bit afin de créer des circuits électroniques.
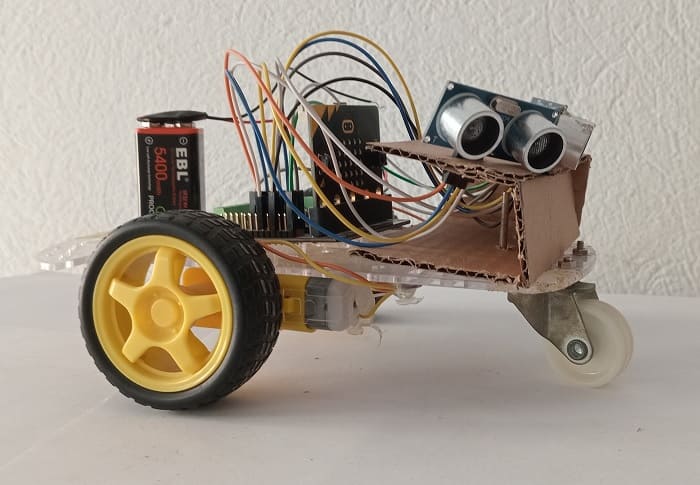
Kit robot voitures de 2 roues

Un kit robot voiture à deux roues est un ensemble de pièces et de composants qui permet de construire un robot mobile à deux roues. Ces kits sont généralement destinés aux débutants en robotique et sont conçus pour être faciles à utiliser et à assembler.
Le kit robot utilisé dans ce projet est composé de :
1- châssis de voiture
2- deux moteurs à engrenages
3- deux pneus de voiture
4-une roue universelle
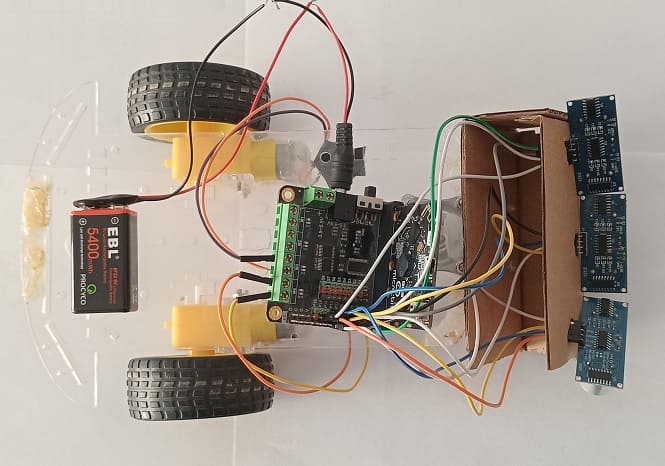
Montage du robot
Voici les étapes de base pour le montage d'un robot suiveur d'objet à deux roues basé sur la carte Micro:bit, les capteurs ultrason HC-SR04 et le module L298N :
1- Montage du châssis :
Assemblez le châssis du robot en suivant les instructions fournies avec le kit ou en concevant votre propre châssis. Fixez solidement les moteurs sur le châssis à l'aide de supports ou de fixations appropriés.
2- Installation des capteurs ultrason :
Fixez les capteurs ultrason HC-SR04 à l'avant du châssis de m2anière à ce qu'ils soient orientés vers l'avant, permettant ainsi au robot de détecter les obstacles et l'objet à suivre.
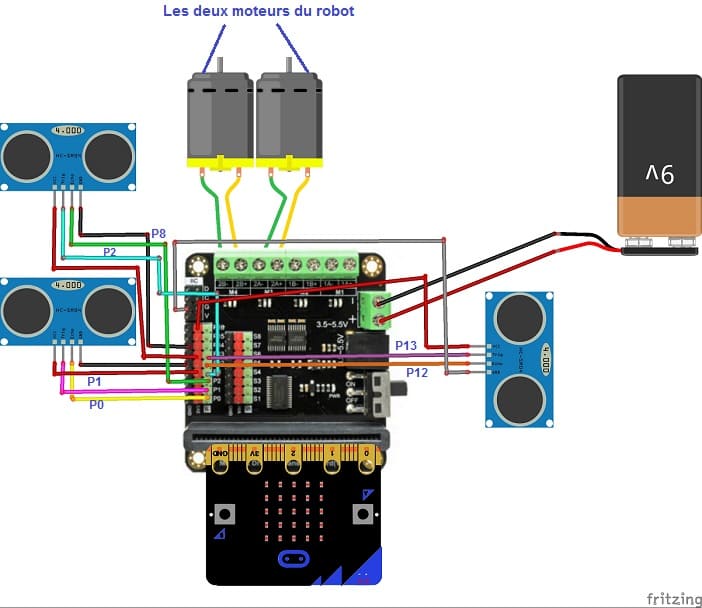
3- Connexion des capteurs ultrason à la carte Micro:bit :
Connectez les broches de signal des capteurs ultrason aux broches d'entrée de la carte Micro:bit. Vous aurez besoin de deux broches par capteur : une pour le signal de déclenchement et une pour le signal d'écho.
Connexion du capteur à droite HC-SR04 à la carte Micro:bit
Connecter la broche VCC du capteur HC-SR04 à la broche 3.3V de la carte Micro:bit.
Connecter la broche GND du capteur HC-SR04 à la broche GND de la carte Micro:bit.
Connecter la broche Trig du capteur HC-SR04 à la broche P1 de la carte Micro:bit.
Connecter la broche Echo du capteur HC-SR04 à la broche P0 de la carte Micro:bit.
Connexion du capteur au centre HC-SR04 à la carte Micro:bit
Connecter la broche VCC du capteur HC-SR04 à la broche 3.3V de la carte Micro:bit.
Connecter la broche GND du capteur HC-SR04 à la broche GND de la carte Micro:bit.
Connecter la broche Trig du capteur HC-SR04 à la broche P8 de la carte Micro:bit.
Connecter la broche Echo du capteur HC-SR04 à la broche P2 de la carte Micro:bit.
Connexion du capteur à droite HC-SR04 à la carte Micro:bit
Connecter la broche VCC du capteur HC-SR04 à la broche 3.3V de la carte Micro:bit.
Connecter la broche GND du capteur HC-SR04 à la broche GND de la carte Micro:bit.
Connecter la broche Trig du capteur HC-SR04 à la broche P13 de la carte Micro:bit.
Connecter la broche Echo du capteur HC-SR04 à la broche P12 de la carte Micro:bit.
4- Connexion des moteurs au module L298N :
- Connectez les fils du premier moteur au borne M3 à la carte Driver
- Connectez les fils du deuxième moteur au borne M4 à la carte Driver
5- Alimentation électrique :
Connectez une batterie de 9V à la carte Driver pour alimenter la carte Micro:bit, les moteurs et les capteurs HC-SR04.
Programmation de la carte Micro:bit avec Makecode
Suivez ces étapes pour ajouter le code nécessaire :
1- Ouvrez l'éditeur MakeCode pour Micro:bit sur le site https://makecode.microbit.org/.
2- Créez un nouveau projet.
3- Cliquez sur "Extensions" dans le coin inférieur gauche.
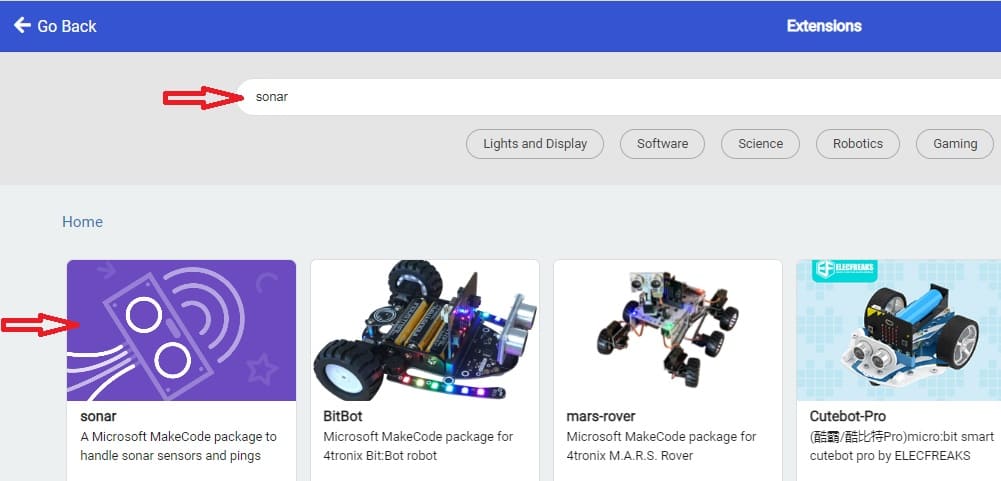
4- Rechercher et ajouter l'extension "sonar"
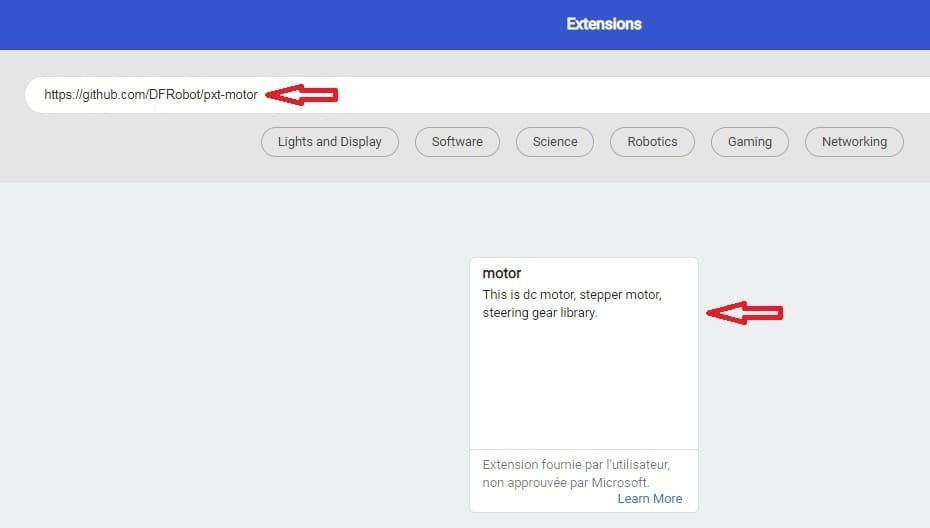
5- Cliquez une autre fois sur "Extensions" dans le coin inférieur gauche.
6-Ajouter ce lien "https://github.com/DFRobot/pxt-motor" dans la recherche des extensions pour contrôler les deux moteurs par la carte Driver.
7- Maintenant, vous pouvez insérer ce programme avec Makecode :
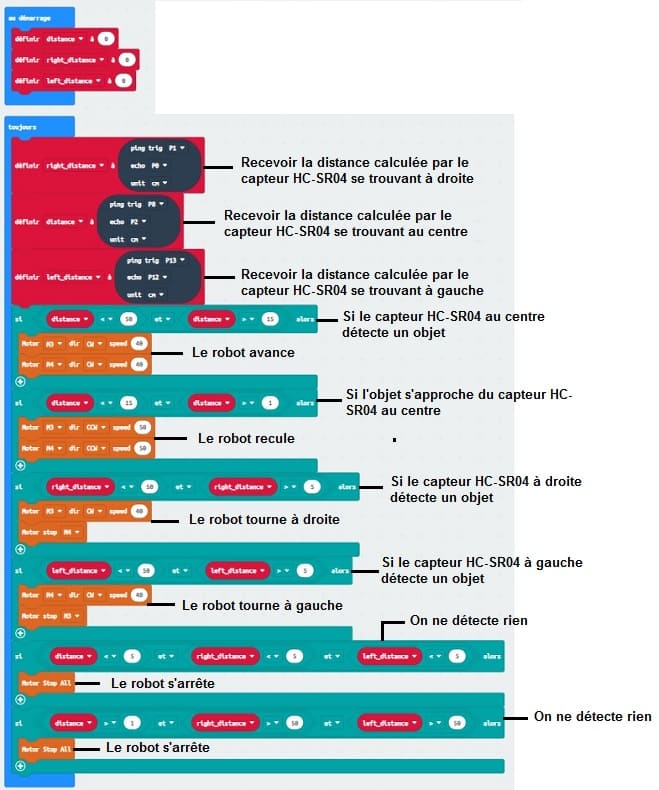
Voici une approche générale pour ce programme:
1- Utilisez les capteurs à ultrasons pour détecter les obstacles devant le robot.
2- Si un objet est détecté :
a- Utilisez les informations des capteurs pour déterminer la direction de l'objet détecté par rapport au robot.
b- Faites en sorte que le robot tourne dans la direction de l'objet.
c- Continuez à faire avancer le robot tout en ajustant sa trajectoire pour suivre l'objet détecté.
0 commentaire
laisser un commentaire
Passion de robotique

Tutoriels récents





Atelier robotique

Tutoriels populaires





Construction des robots

Tutoriels plus commentés



Bras robotique

Categories
Maison intelligente






