Robot suiveur de ligne commandé par Micro:bit
Plan de tutoriel
1- Qu'est ce qu'un robot suiveur de ligne ?
2- Fonctionnement du Robot suiveur de ligne commandé par ESP32
3- Les composants du robot
4- Schéma de câblage du robot
5- Programmation de la carte Micro:bit
Qu'est ce qu'un robot suiveur de ligne ?
Un robot suiveur de ligne est un type de robot conçu pour suivre une ligne tracée sur le sol. Cette ligne peut être noire, blanche, ou d'une autre couleur contrastante, et elle est généralement utilisée dans des environnements contrôlés, comme sur un parcours de compétition ou dans des applications industrielles.
Le principe de fonctionnement repose sur des capteurs qui détectent la ligne et permettent au robot d'ajuster ses mouvements pour la suivre. Les capteurs les plus courants sont des capteurs de réflexion infrarouge (IR), qui détectent la différence entre la couleur de la ligne (par exemple, noire) et la couleur du fond (par exemple, blanche ou claire). Lorsque le robot s'éloigne de la ligne, les capteurs envoient des informations au contrôleur qui ajuste la direction des roues pour recentrer le robot sur la ligne.
Les robots suiveurs de ligne sont souvent utilisés pour des démonstrations de robotique, des compétitions (comme la RoboCup ou les défis FIRST) et des applications industrielles où des robots doivent se déplacer le long de parcours prédéfinis.
Fonctionnement du Robot suiveur de ligne commandé par Micro:bit
Un robot suiveur de ligne basé sur une carte Micro:bit utilise des capteurs infrarouges KY-032 pour détecter une ligne noire ou blanche sur le sol et ajuster ses mouvements pour la suivre.
Principe de fonctionnement :
Détection de la ligne :
Les capteurs infrarouges KY-032 émettent une lumière infrarouge et détectent la réflexion de cette lumière sur le sol.
Une surface claire (ligne blanche) réfléchit beaucoup de lumière.
Une surface sombre (ligne noire) réfléchit peu ou pas de lumière.
En fonction du signal reçu, chaque capteur donne une valeur numérique (0 ou 1) au Micro:bit.
Réactions basées sur les capteurs :
Les deux capteurs détectent une surface sombre (ligne noire) : Le robot avance en ligne droite.
Le capteur gauche détecte la ligne noire, mais pas le droit : Le robot tourne légèrement à gauche pour corriger sa trajectoire.
Le capteur droit détecte la ligne noire, mais pas le gauche : Le robot tourne légèrement à droite.
Aucun capteur ne détecte la ligne : Le robot s'arrête ou effectue une correction (par exemple, recule légèrement et pivote).
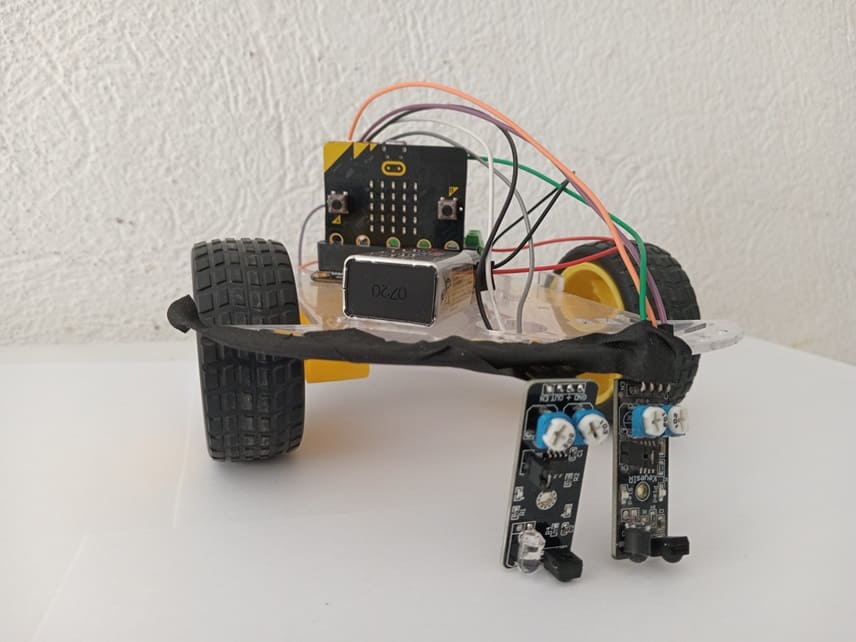
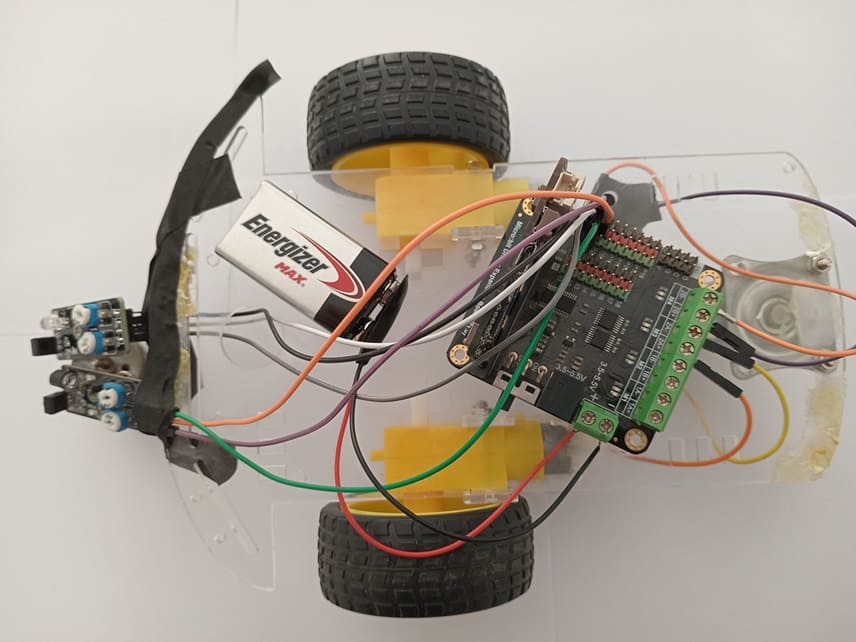
Les composants du robot
Micro:bit :
Cerveau du robot, il traite les informations reçues des capteurs et contrôle les moteurs en conséquence.
Capteurs Infrarouge KY-032 :

Deux capteurs de détection de ligne qui identifient la présence ou l'absence de la ligne en fonction de la réflexion de la lumière infrarouge. Généralement, une ligne noire sur un fond clair (ou vice-versa) est détectée par la variation de réflexion.
Carte DRIVER EXPANSION pour Micro:bit :
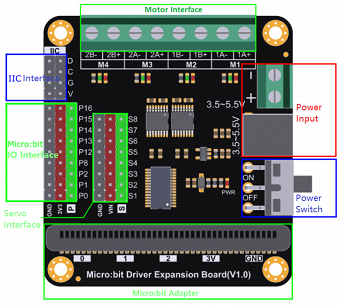
Interface entre le Micro:bit et les moteurs. Elle permet de contrôler la direction et la vitesse des roues en fonction des commandes reçues du Micro:bit.
Châssis à Deux Roues :

Structure physique du robot équipée de deux roues motrices qui permettent le déplacement et de pivots pour les virages.
Batterie de 9V :

Source d’alimentation pour l’ensemble des composants électroniques du robot.
Fils de connexion

Il sont des fils électriques utilisés pour connecter des composants électroniques à la carte Micro:bit.
Schéma de câblage du robot
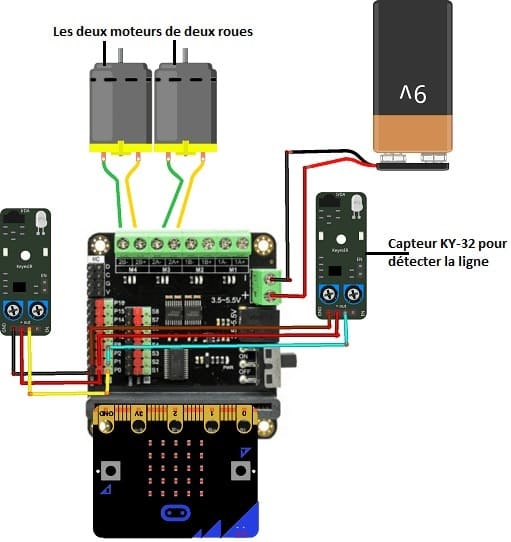
1- Connecter les capteurs KY-032 aux broches GPIO du Micro:bit via la carte DRIVER EXPANSION :
KY-032 gauche : broche P0.
KY-032 droit : broche P1.
2- Relier les moteurs à la carte DRIVER EXPANSION (via les connecteurs pour moteurs).
3- Brancher la batterie 9V pour alimenter le système.
4- Assurez-vous que le Micro:bit est correctement fixé et que tout est bien isolé pour éviter les courts-circuits.
Programmation de la carte Micro:bit
Suivez ces étapes pour ajouter le code nécessaire :
1- Ouvrez l'éditeur MakeCode pour Micro:bit sur le site https://makecode.microbit.org/.
2- Créez un nouveau projet.
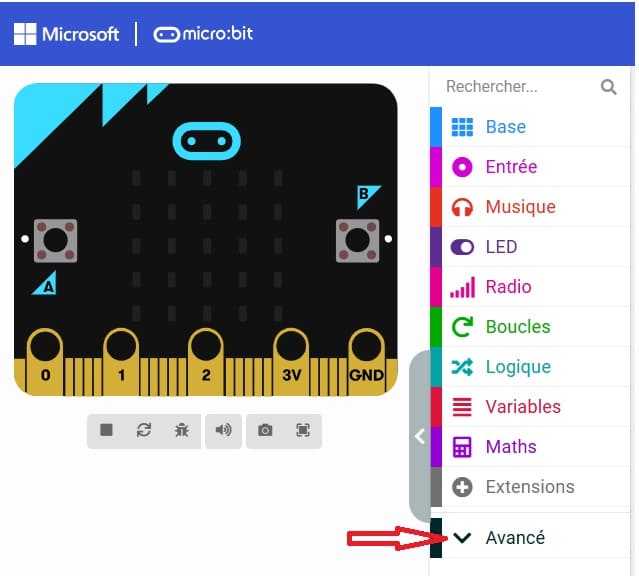
3- Cliquer sur Avancé
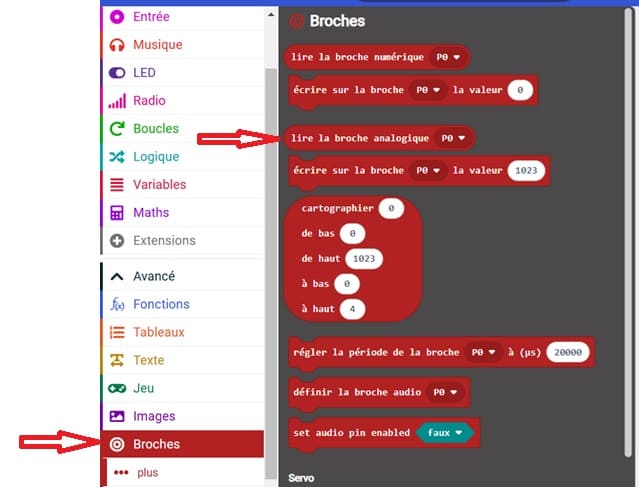
4- Cliquer sur Broches et choisir le bloc "lire la broche analogique P0" pour lire les valeurs retournées par les capteurs KY-032.
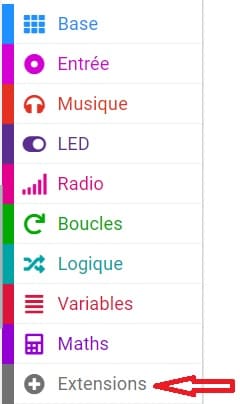
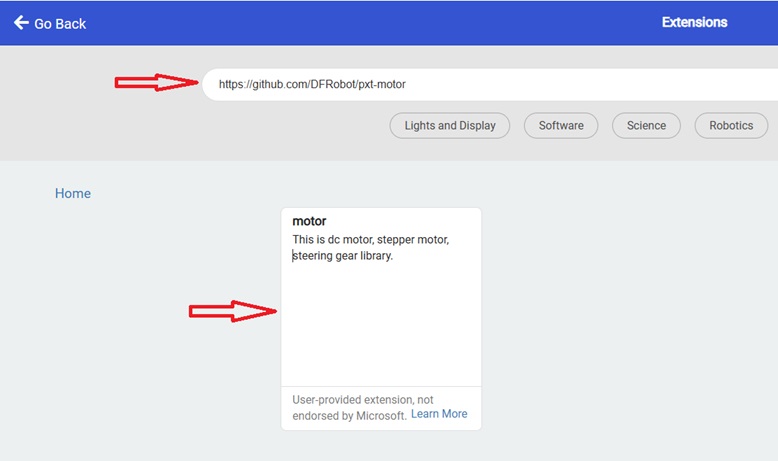
5- Cliquez sur "Extensions" dans le coin inférieur gauche.
6- Insérer ce lien ""https://github.com/DFRobot/pxt-motor" " dans la recherche pour utiliser les blocs de contrôle des moteurs
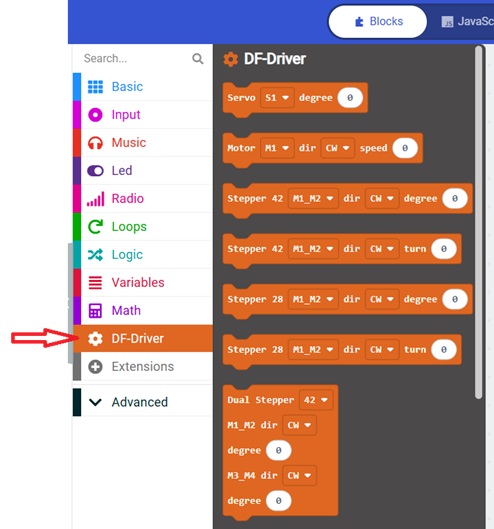
Maintenant, vous pouvez insérer ce programme avec Makecode:
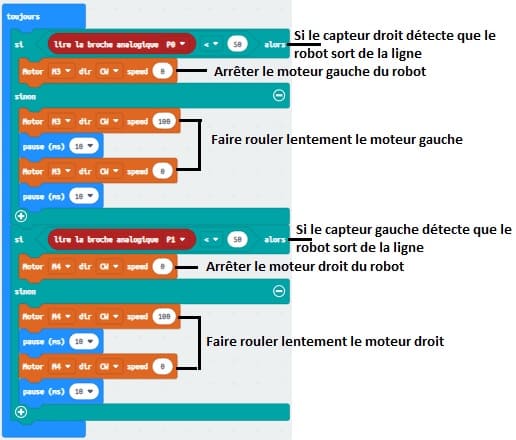
Après l’assemblage et la programmation, effectuer des tests pour :
1- Vérifier la détection correcte de la ligne par les capteurs.
2- Ajuster les seuils de détection si nécessaire (par exemple, ajuster la sensibilité des capteurs infrarouges).
3- Optimiser les commandes des moteurs pour des virages plus fluides et une meilleure réactivité.
0 commentaire
laisser un commentaire
Passion de robotique

Tutoriels récents

Atelier robotique

Tutoriels populaires





Construction des robots

Tutoriels plus commentés




Bras robotique

Categories
Maison intelligente






