Robot Micro:bit détecteur des obstacles
Plan de tutoriel
1- Qu'est ce qu'un robot détecteur des obstacles ?
2- Fonctionnement du robot Micro:bit détecteur des obstacles
3- Matériel nécessaire
4- Schéma du montage du robot
5- Programmation de la carte Micro:bit avec Makecode
Qu'est ce qu'un robot détecteur des obstacles ?
Un robot détecteur d'obstacles est un type de robot conçu pour percevoir son environnement, identifier les obstacles, et réagir en conséquence pour éviter les collisions. Il est largement utilisé dans des applications de robotique autonome, telles que les robots de nettoyage, les véhicules autonomes, ou les robots explorateurs.
Principaux composants d'un robot détecteur d'obstacles
1- Capteurs pour la détection des obstacles :
Capteurs à ultrasons : Mesurent les distances en envoyant des ondes sonores et en analysant l'écho.
Capteurs infrarouges (IR) : Détectent la proximité des objets en mesurant la réflexion d’un rayon infrarouge.
Caméras ou capteurs de vision : Fournissent une image ou un flux vidéo pour analyser l'environnement avec des algorithmes de vision par ordinateur.
LIDAR (Light Detection and Ranging) : Scanne l'environnement avec des lasers pour construire une carte 3D ou mesurer les distances.
Capteurs tactiles (bumpers) : Détectent un obstacle lorsqu'il est physiquement touché.
Capteurs de distance à base de laser : Similaires au LIDAR, mais plus simples et souvent utilisés pour des applications spécifiques.
2- Unité de traitement :
Généralement un microcontrôleur ou un microprocesseur (comme Arduino, Raspberry Pi, ou autres) qui traite les informations des capteurs.
Algorithmes de détection et de prise de décision pour réagir face aux obstacles.
3- Système d’action :
Moteurs et actionneurs : Pour ajuster le mouvement du robot (roues, chenilles, jambes, etc.).
Système de pilotage : Contrôle la direction ou la vitesse en fonction des données des capteurs.
4- Source d'énergie :
Batteries ou autres sources d'énergie pour alimenter les capteurs, le processeur, et les moteurs.
Fonctionnement d’un robot détecteur d'obstacles
1- Détection : Les capteurs détectent les obstacles à proximité.
2- Analyse : Les données des capteurs sont envoyées au microcontrôleur pour analyse.
3- Prise de décision : L’algorithme détermine la meilleure action à entreprendre (s’arrêter, tourner, reculer, etc.).
4- Action : Le système d'action ajuste les mouvements du robot pour éviter l'obstacle.
Exemples d'applications
Robots de nettoyage : Les robots aspirateurs comme le Roomba utilisent des capteurs pour détecter les murs, les meubles et autres obstacles.
Véhicules autonomes : Ils utilisent des technologies avancées comme LIDAR, radar, et caméras pour naviguer sans heurter les obstacles.
Robots éducatifs : Des robots simples pour apprendre la programmation et la robotique, tels que mBot ou Lego Mindstorms.
Exploration : Robots utilisés dans des environnements dangereux ou inconnus (mines, zones sinistrées, etc.).
Fonctionnement du robot Micro:bit détecteur des obstacles
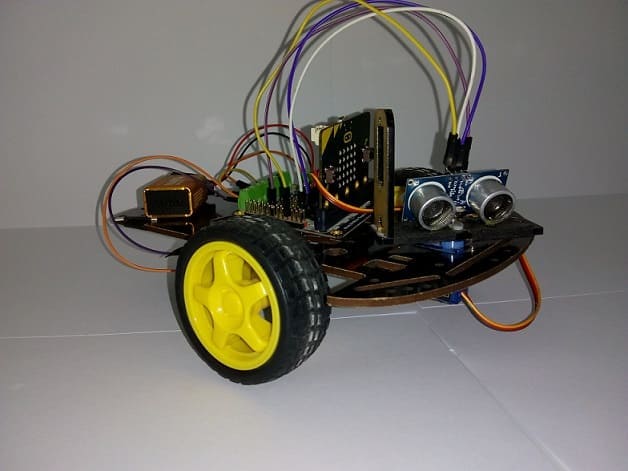
Le robot Micro:bit détecteur d'obstacles utilisant un capteur ultrasonique HC-SR04, un servomoteur, une carte DRIVER EXPANSION pour Micro:bit, et un kit de deux roues fonctionne de manière autonome pour détecter et éviter les obstacles. Voici une description détaillée de son fonctionnement et de ses composants :
a) Initialisation
1. La carte DRIVER EXPANSION connecte tous les composants au Micro:bit.
2. Le programme initialisé sur le Micro:bit configure :
Le capteur ultrasonique pour mesurer la distance.
Le servomoteur pour orienter le capteur.
Les moteurs pour le déplacement.
3. Le robot démarre en mode de détection.
b) Mesure de la distance avec le HC-SR04
1. Le Micro:bit envoie un signal à la broche Trig du capteur pour déclencher une impulsion ultrasonore.
2. Cette impulsion voyage jusqu’à un obstacle et revient sous forme d’écho.
3. Le capteur génère une impulsion sur la broche Echo, dont la durée est proportionnelle à la distance entre le capteur et l’obstacle.
c) Orientation avec le servomoteur
1. Le Micro:bit commande le servomoteur pour orienter le capteur ultrasonique dans différentes directions (gauche, centre, droite).
2. À chaque orientation, le capteur mesure la distance et renvoie les valeurs au Micro:bit.
3. Cette information permet au robot de déterminer si un obstacle est présent, et de quelle direction il provient.
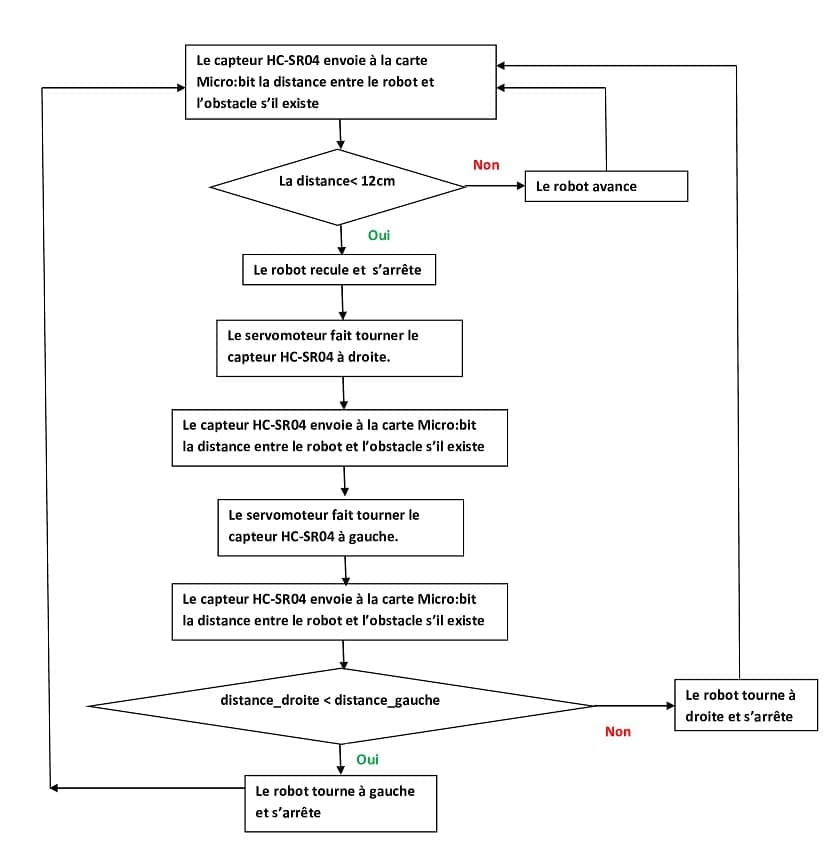
d) Prise de décision et mouvement
1. Si un obstacle est détecté dans la direction centrale :
Le robot s’arrête.
Le capteur ultrasonique scanne les côtés pour trouver un chemin dégagé.
2. Si un chemin est libre à gauche ou à droite, le robot tourne dans cette direction.
3. Si aucun chemin n’est libre, le robot recule et réévalue la situation.
4. Les moteurs sont contrôlés via la carte DRIVER EXPANSION :
Avancer : Les deux moteurs tournent dans le même sens.
Reculer : Les deux moteurs tournent dans le sens inverse.
Tourner à gauche : Le moteur droit avance, le moteur gauche s'arrête ou recule.
Tourner à droite : Le moteur gauche avance, le moteur droit s'arrête ou recule.
Matériel nécessaire
Micro:bit :
C'est un microcontrôleur qui sert de cerveau du robot. Il traite les données des capteurs et contrôle les moteurs et le servomoteur.
Capteur Ultrasonique HC-SR04 :
Ce capteur mesure la distance entre le robot et les obstacles en envoyant des impulsions ultrasonores et en mesurant le temps de retour de l’écho.
Servomoteur :

Le servomoteur contrôle l’orientation du capteur ultrasonique, permettant au robot de scanner son environnement (gauche, centre, droite).
Carte DRIVER EXPANSION pour Micro:bit :
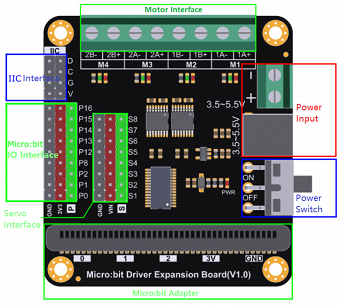
Une carte d’extension permettant de connecter facilement des moteurs, capteurs, et autres périphériques au Micro:bit.
Fournit des broches pour les moteurs et une alimentation stable pour tous les composants.
Kit de deux roues :

Comprend deux roues alimentées par des moteurs CC et une roue folle pour la stabilité.
Les moteurs permettent au robot de se déplacer en avant, en arrière, ou de tourner.
Alimentation électrique :

Le robot aura besoin d'une source d'alimentation électrique pour fonctionner. Cela peut être une batterie rechargeable ou des piles, en fonction de la portabilité et de la durée d'utilisation souhaitées.
Câblage et connecteurs :

Des fils électriques et des connecteurs seront nécessaires pour relier les différents composants entre eux et à la carte Arduino UNO.
Schéma du montage du robot
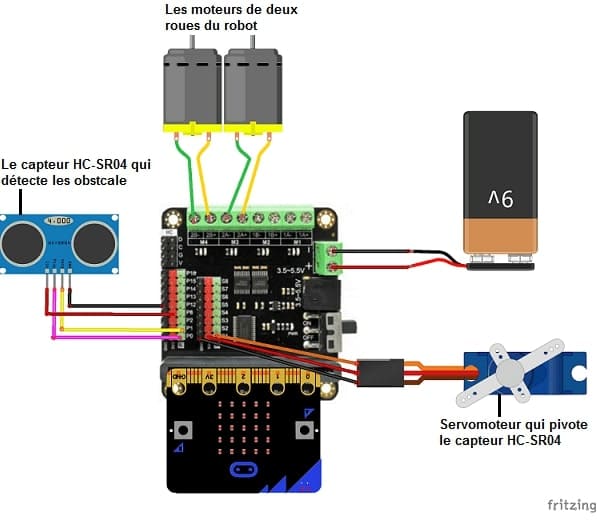
1- Pour le capteur HC-SR04 on connecte :
La borne GND du capteur à la broche GND du Micro:bit
La borne VCC du capteur à la broche 3.3V du Micro:bit
La borne ECHO du capteur à la broche P1 du Micro:bit
La borne TRIG du capteur à la broche P0 du Micro:bit
2- On connecte le servomoteur aux broches S1 de la Carte DRIVER EXPANSION
3- On branche les deux moteurs de deux roues Aux deux connecteurs M3 et M4 de la Carte DRIVER EXPANSION.
Programmation de la carte Micro:bit avec Makecode
Suivez ces étapes pour ajouter le code nécessaire :
1- Ouvrez l'éditeur MakeCode pour Micro:bit sur le site https://makecode.microbit.org/.
2- Créez un nouveau projet.
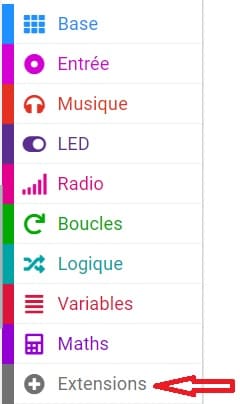
3- Cliquer sur Extension
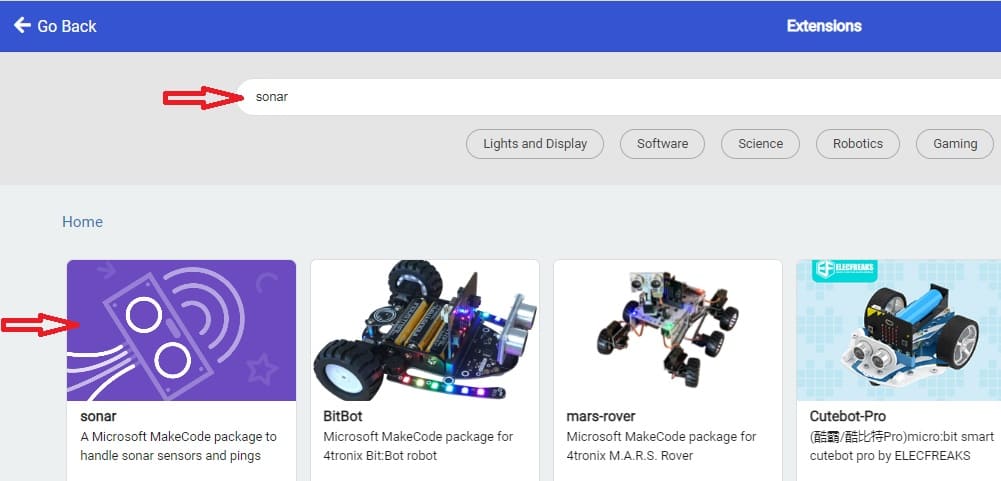
4- Rechercher et ajouter l'extension "sonar" pour le capteur ultrason HC-SR04
5- Cliquez sur "Extensions" dans le coin inférieur gauche.
6- Recherchez et ajoutez l'extension "muselab-oled-v2" pour SSD1306 à votre projet.
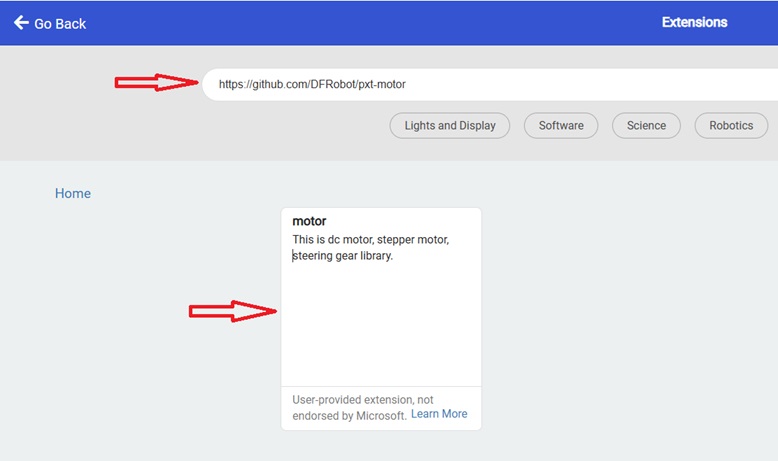
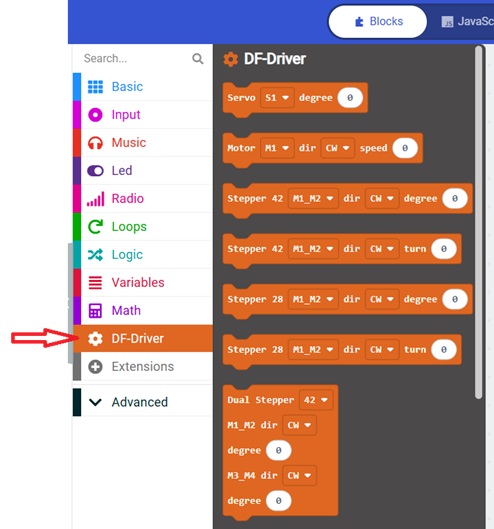
Insérer ce lien ""https://github.com/DFRobot/pxt-motor" " dans la recherche pour utiliser les blocs de contrôle des moteurs
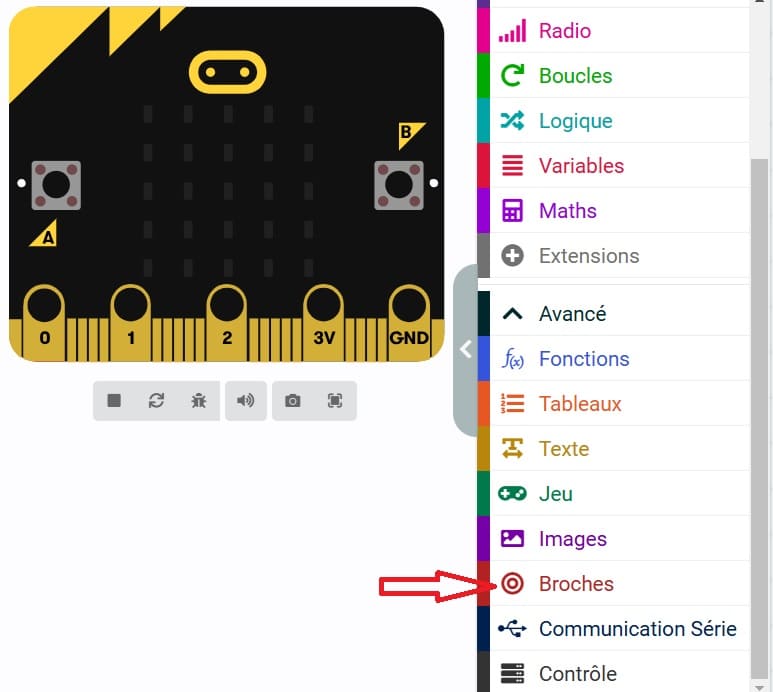
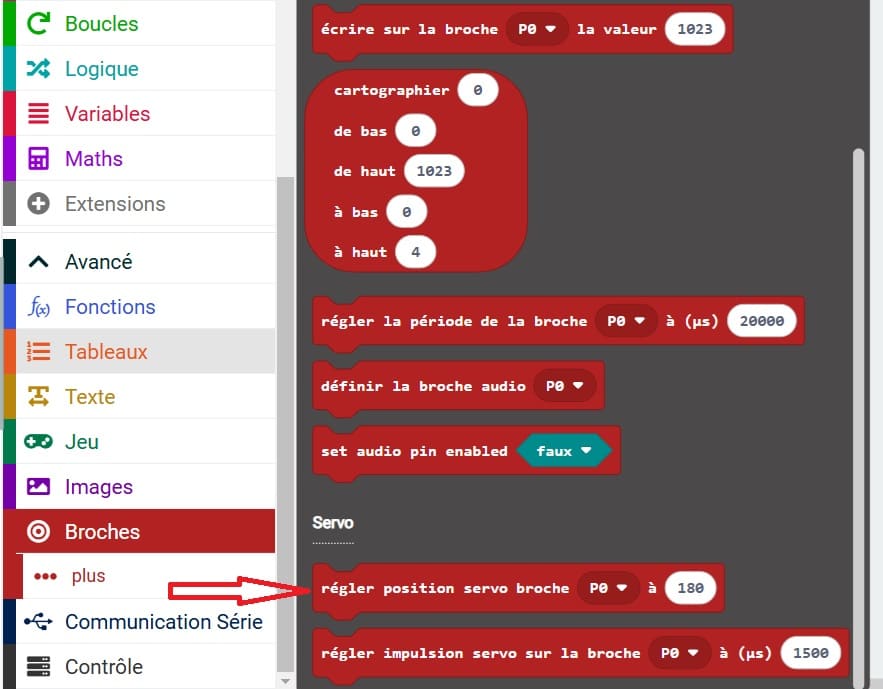
7- Cliquez sur "Broches"
8- Choisir l'instruction régler position servo broche P0 à 180 pour commander le servomoteur :
Vous pouvez maintenant développer le programme Makecode du robot Micro:bit qui détecte et évite les obstacles en utilisant un capteur de distance à ultrasons:
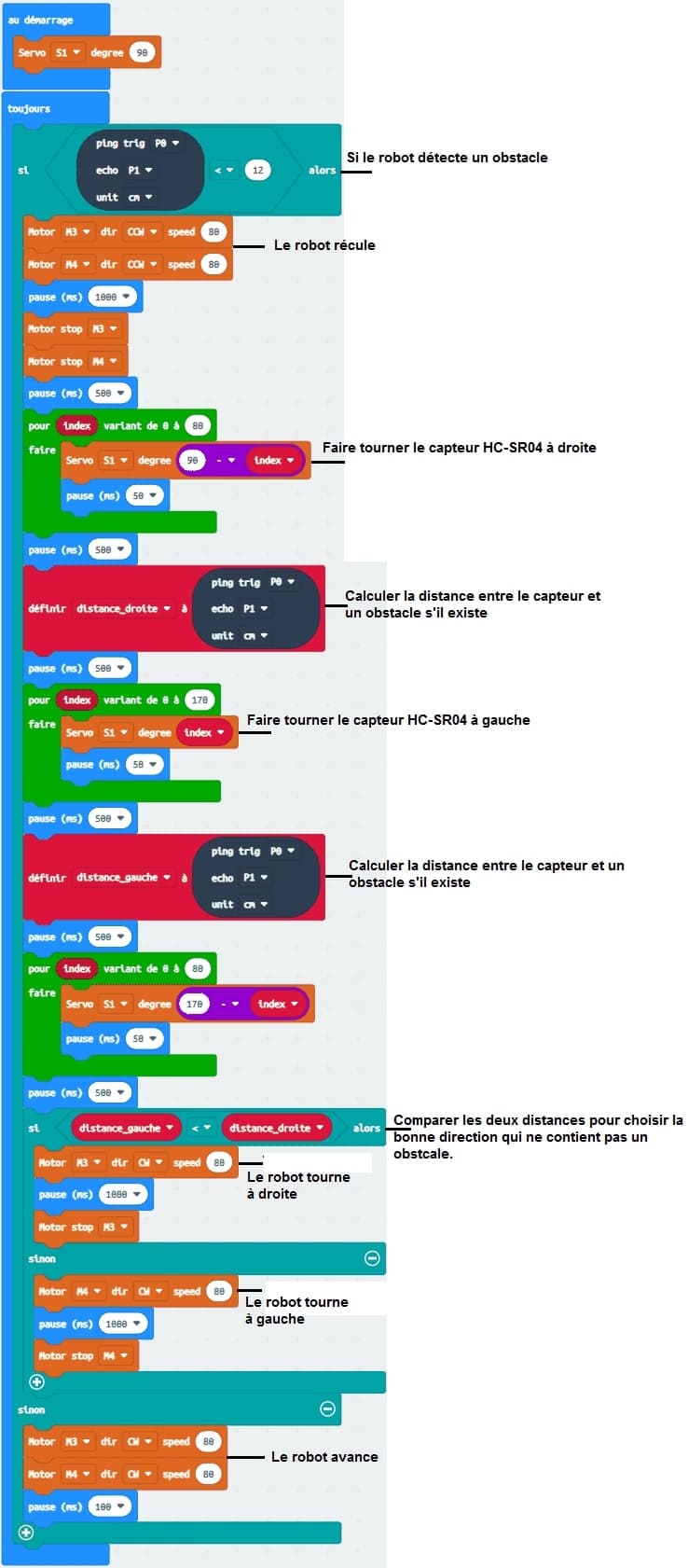
Résultat attendu
1- Le robot avance tant qu’aucun obstacle n’est détecté.
2- Lorsqu’un obstacle est détecté :
- Le robot s’arrête.
- Le capteur scanne son environnement (gauche, centre, droite).
- Le robot tourne vers la direction dégagée ou recule si nécessaire.
Ce système simple et efficace est idéal pour apprendre les bases de la robotique autonome
0 commentaire
laisser un commentaire
Passion de robotique

Tutoriels récents





Atelier robotique

Tutoriels populaires





Construction des robots

Tutoriels plus commentés




Bras robotique

Categories
Maison intelligente






