Remplissage des bouteilles en utilisant la carte ESP32 et le capteur HC-SR04
Plan du tutoriel
1- Les systèmes de remplissage automatique des bouteilles
2- Comment la carte ESP32 contrôle le remplissage automatique des bouteille ?
3- Matériel requis du système
4- Schéma de câblage du système
5- Programmation de la carte ESP32
Les systèmes de remplissage automatique des bouteilles
Les systèmes de remplissage automatique des bouteilles sont des équipements industriels conçus pour automatiser le processus de remplissage des contenants (comme des bouteilles, des canettes ou des flacons) avec différents types de liquides. Ces systèmes sont utilisés dans de nombreux secteurs tels que l’agroalimentaire, les boissons, la pharmaceutique, les cosmétiques, et même dans l’industrie chimique. Leur principal objectif est de réduire les coûts de production, d’améliorer la précision et de garantir la qualité et l’hygiène des produits.
Objectifs des systèmes de remplissage automatique des bouteilles :
1. Augmenter l’efficacité de la production : Les systèmes automatiques permettent de remplir un grand nombre de contenants rapidement et sans intervention humaine.
2. Améliorer la précision du remplissage : Le système assure un dosage exact et évite les débordements.
3. Réduire les erreurs humaines : Grâce à l’automatisation, le taux d’erreur est minimisé, ce qui garantit la qualité du produit final.
4. Optimiser l’hygiène et la sécurité alimentaire : Ces systèmes peuvent être conçus pour respecter des normes sanitaires strictes, avec des dispositifs de nettoyage intégrés (CIP – Cleaning In Place).
Principe de fonctionnement des systèmes de remplissage automatique :
1. Alimentation des bouteilles : Les bouteilles vides sont automatiquement chargées dans le système via un convoyeur ou un dispositif d’alimentation.
2. Détection de la position des bouteilles : Des capteurs détectent la position des bouteilles et les alignent correctement sous les buses de remplissage.
3. Remplissage du liquide : Le liquide (par exemple, une boisson, un produit chimique, un médicament) est transféré dans les bouteilles par des vannes, des pompes ou des systèmes sous pression. Le niveau de liquide dans chaque bouteille est contrôlé pour garantir qu'il est constant.
4. Arrêt automatique : Dès qu'une bouteille est remplie, le système arrête le débit de liquide, empêchant ainsi les débordements.
5. Bouchage : Après le remplissage, les bouteilles passent à la station de bouchage pour être fermées hermétiquement.
6. Étiquetage et emballage (facultatif) : Une fois bouchées, les bouteilles peuvent être étiquetées et emballées, prêtes à être expédiées.
Comment la carte ESP32 contrôle le remplissage automatique des bouteille ?
Pour réaliser un système de remplissage automatique des bouteilles contrôlé par une carte ESP32 en utilisant un capteur HC-SR04 pour la détection des bouteilles, un moteur pas à pas 28BYJ-48, une pompe à eau, un module relais, ainsi que des éléments mécaniques comme une tige support, un disque et une courroie de distribution, voici une description détaillée du fonctionnement de ce système :
1- Détection de la bouteille :
Lorsqu'une bouteille arrive sous le capteur HC-SR04, le capteur envoie une impulsion ultrasonique et calcule la distance. Si la bouteille est détectée à la distance correcte, l'ESP32 reçoit le signal de confirmation.
L'ESP32 analyse la distance et, si la bouteille est prête à être remplie, passe à l'étape suivante.
2- Mouvement de la bouteille :
Le moteur pas à pas 28BYJ-48 fait tourner le disque ou la courroie de distribution pour amener la bouteille à la position correcte sous la station de remplissage. Ce moteur peut aussi être utilisé pour faire avancer une série de bouteilles sur une chaîne de production.
L’ESP32 contrôle la vitesse et la direction du moteur en fonction de la position de la bouteille et du temps nécessaire pour l’amener sous la pompe.
3- Activation de la pompe à eau :
Une fois la bouteille en place, l’ESP32 active le module relais qui met en marche la pompe à eau.
La pompe envoie le liquide dans la bouteille. La durée de l'activation de la pompe peut être contrôlée pour s'assurer que la bouteille est remplie à la bonne quantité.
4- Arrêt du remplissage et déplacement de la bouteille :
Une fois que la bouteille est remplie, le capteur HC-SR04 peut être utilisé pour vérifier si le remplissage est terminé (par exemple, en détectant que la bouteille est pleine et que le capteur est trop proche).
L’ESP32 arrête alors la pompe via le relais et déplace la bouteille suivante en activant à nouveau le moteur pas à pas.
Matériel requis du système
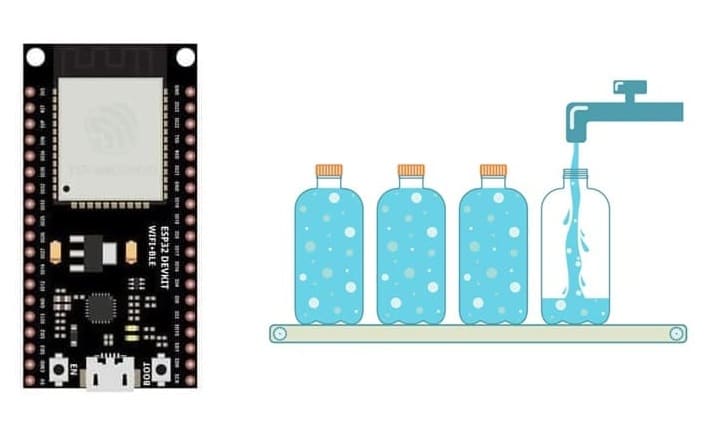
Carte ESP32 :

La carte ESP32 est le cœur du système, elle contrôle tous les composants en envoyant des commandes à chaque module en fonction des données reçues. Elle peut aussi être utilisée pour la communication sans fil via Wi-Fi ou Bluetooth si nécessaire.
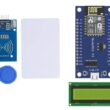
Capteur HC-SR04 (Ultrasonique) :

Ce capteur sert à détecter la présence et la position des bouteilles sur la ligne de production en mesurant la distance entre le capteur et la bouteille.
Il envoie une impulsion ultrasonique qui rebondit sur la bouteille, et la durée du retour de l’écho permet de calculer la distance. Lorsque la bouteille est détectée à une certaine distance, le système lance le processus de remplissage.
Moteur Pas à Pas 28BYJ-48 :
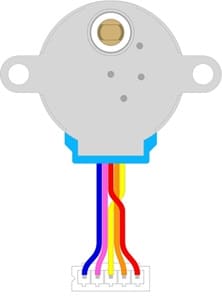
Ce moteur est utilisé pour déplacer les bouteilles sur le convoyeur ou pour actionner un mécanisme de rotation (par exemple, un disque rotatif pour aligner les bouteilles sous la station de remplissage).
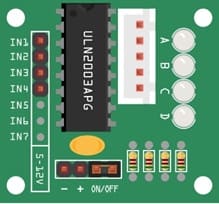
L'ESP32 utilise un pilote de moteur pas à pas (par exemple, le ULN2003 ou un autre module dédié) pour envoyer les signaux nécessaires à la rotation du moteur.
Pompe à Eau :

La pompe à eau est utilisée pour pomper le liquide (eau ou autre liquide) depuis un réservoir et l’envoyer dans les bouteilles.
La pompe est contrôlée par un module relais qui permet à l'ESP32 d’activer ou de désactiver la pompe en fonction du processus de remplissage.
Module Relais :

Le module relais agit comme un interrupteur électronique pour activer des composants nécessitant plus de courant ou de tension que ce que l'ESP32 peut fournir directement (comme la pompe à eau).
L'ESP32 envoie un signal de commande au relais pour allumer ou éteindre la pompe ou tout autre appareil nécessitant une alimentation plus élevée.
Tige Support, Disque, Courroie de Distribution :



Ces éléments mécaniques sont utilisés pour supporter et déplacer les bouteilles. Par exemple, la tige support peut maintenir le moteur pas à pas et les éléments rotatifs, le disque peut être utilisé pour aligner les bouteilles sous la pompe de remplissage, et la courroie de distribution peut être utilisée pour faire circuler les bouteilles sur une ligne de production.
Le moteur pas à pas fait tourner le disque ou la courroie, ce qui déplace les bouteilles sous le mécanisme de remplissage. Une fois que la bouteille est sous la pompe, l'ESP32 active le relais pour commencer le remplissage.
Batterie de 9V

On utilise cette batterie pour alimenter la pompe à eau.
Fils de connexion

Les fils de connexion sont des fils électriques utilisés pour connecter des composants électroniques à la carte ESP32.
Breadboard (ou plaque d'essai sans soudure)

Une breadboard est un composant essentiel pour les prototypes électroniques. Elle permet de réaliser des montages facilement sans avoir à souder les composants.
Schéma de câblage du système
1- Montage de la carte ESP32 et le capteur HC-SR04
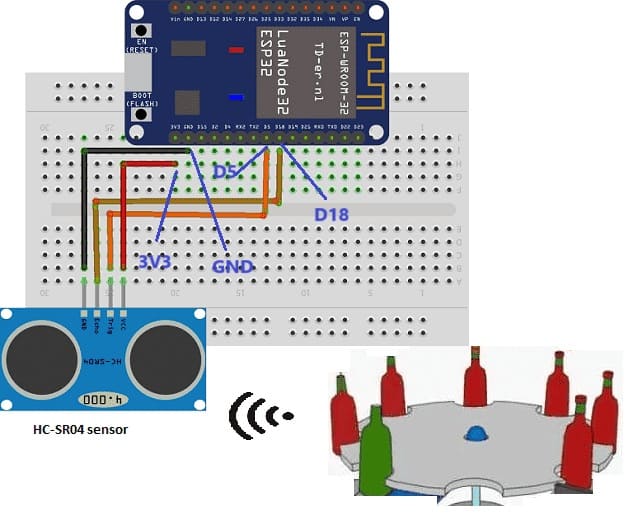
On utilise la capteur HC-SR04 pour détecter s’il existe une bouteille dans la bonne position pour la remplir.
On connecte:
- la broche VCC du capteur à la broche 3.3V de la carte ESP32
- la broche GND du capteur à la broche GND de la carte ESP32
- la broche Trig du capteur à la broche N°5 de la carte ESP32
- la broche Echo du capteur à la broche N°18 de la carte ESP32
2- Montage de la carte ESP32 avec le moteur pas à pas
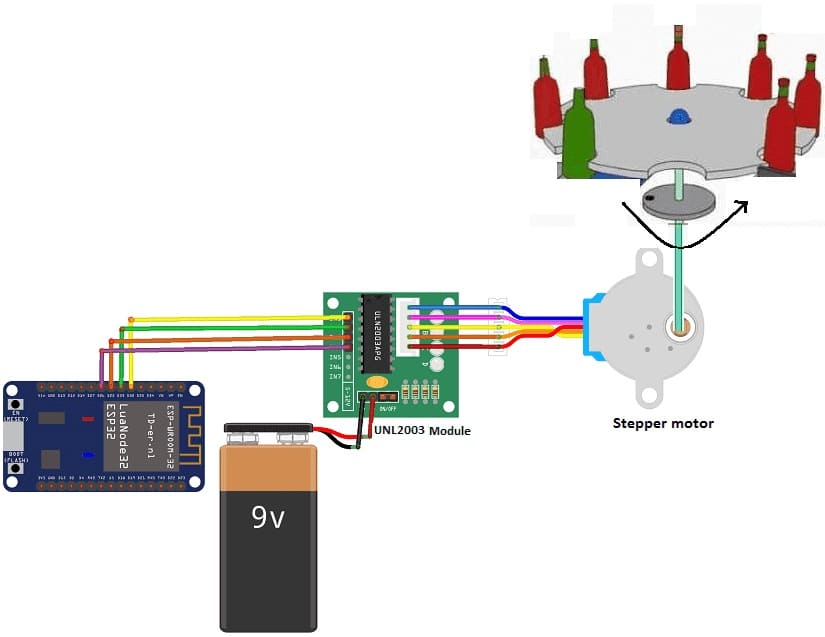
Le rôle du moteur pas à pas est de tourner le disque contenant les bouteilles.
On connecte :
- le module UNL2003 au moteur pas pas
- la broche IN1 du module UNL2003 à broche N°32 de la carte ESP32
- la broche IN2 du module UNL2003 à broche N°33 de la carte ESP32
- la broche IN3 du module UNL2003 à broche N°25 de la carte ESP32
- la broche IN4 du module UNL2003 à broche N°26 de la carte ESP32
3- Montage de la carte ESP32 avec la pompe à eau
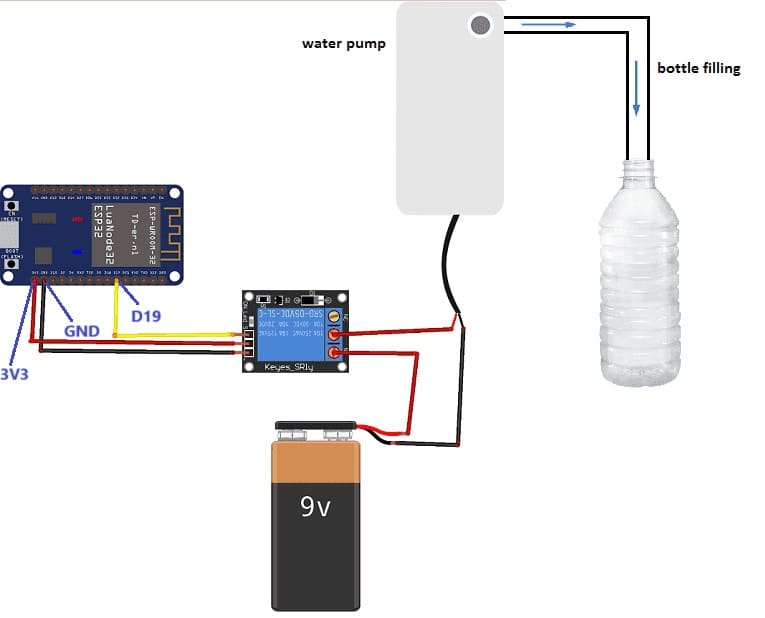
Le relais est le composant intermédiaire entre la carte ESP32 et la pompe à eau. Elle permet à la carte ESP32 de commander la pompe à eau
Le rôle du relais est de faire démarrer ou arrêter la pompe responsable du remplissage des bouteilles.
On connecte
- la borne (-) du relais à la broche GND de la carte ESP32
- la borne (+) du relais à la broche 3.3V de la carte ESP32
- la borne (S) du relais à la broche N°19 de la carte ESP32
Programmation de la carte ESP32
Voici le programme micropython qui permet de commander le système de remplissage automatique des bouteilles par la carte ESP32.
Il faut utiliser ces deux bibliothèques: servo et Stepper.
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 |
import Stepper from machine import Pin, ADC import time from hcsr04 import HCSR04 # for the ESP8266 # In1 = Pin(2,Pin.OUT) # IN1-> GPIO2 # In2 = Pin(0,Pin.OUT) # IN1-> GPIO0 # In3 = Pin(4,Pin.OUT) # IN1-> GPIO4 # In4 = Pin(5,Pin.OUT) # IN1-> GPIO5 # for ESP32 In1 = Pin(32,Pin.OUT) In2 = Pin(33,Pin.OUT) In3 = Pin(25,Pin.OUT) In4 = Pin(26,Pin.OUT) pompe=Pin(19,Pin.OUT) sensor = HCSR04(trigger_pin=5,echo_pin=18,echo_timeout_us=1000000) nbr_bouteilles=1 s1 = Stepper.create(In1,In2,In3,In4, delay=1) time.sleep(5) while (nbr_bouteilles<=3): distance = sensor.distance_cm() print(distance) if (distance<1000): # Si le capteur détecte la bouteille se trouvant dans la bonne position nbr_bouteilles=nbr_bouteilles+1 s1.step(0) # arreter le moteur pas à pas pompe.value(1) # demarrer la pompe à eau time.sleep(10) # remplir la bouteille pendant 10s pompe.value(0) # arreter la pompe à eau s1.step(200) # faire tourner le disque contenant les bouteilles else: s1.step(50) # faire tourner le disque contenant les bouteilles s1.step(150) |
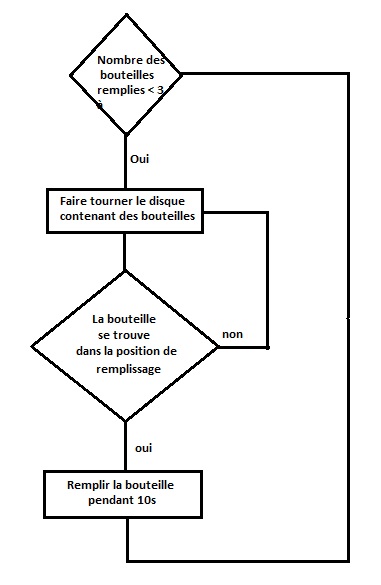
Fonctionnement du programme
1- L'ESP32 lit les données du capteur ultrasonique pour déterminer la présence de la bouteille et sa position.
2- L'ESP32 utilise un driver de moteur pas à pas pour envoyer les signaux nécessaires au moteur 28BYJ-48, lui indiquant quand et de combien de pas tourner.
3- L’ESP32 contrôle un module relais qui active ou désactive la pompe à eau pour remplir la bouteille.
0 commentaire
laisser un commentaire
Passion de robotique

Tutoriels récents





Atelier robotique

Tutoriels populaires





Construction des robots

Tutoriels plus commentés



Bras robotique

Categories
Maison intelligente