Radar basé sur la carte ESP32 et le capteur HC-SR04
Plan du tutoriel
1- Qu'est ce qu'un radar ?
2- Comment il fonctionne le radar commandé par ESP32 ?
3- Les composants du radar
4- Schéma de câblage du radar
5- Programmation ESP32 avec Micropython
6- Programme Python exécuté par l’ordinateur
Qu'est ce qu'un radar ?
Un radar (acronyme de l'anglais RAdio Detection And Ranging) est un système qui utilise des ondes radio pour détecter, localiser, mesurer la vitesse et parfois caractériser des objets à distance. Il est couramment utilisé dans divers domaines tels que l'aviation, la météorologie, la navigation maritime, la défense, et même les systèmes de contrôle de vitesse routière.
Principe de fonctionnement du radar
1. Émission d'ondes radio :
Une antenne émet des ondes électromagnétiques, généralement sous forme d'impulsions radio.
Ces ondes voyagent à la vitesse de la lumière dans l'air.
2. Réflexion des ondes :
Lorsqu'une onde rencontre un objet (avion, navire, voiture, nuage, etc.), une partie de l'énergie est réfléchie vers la source.
3. Réception du signal réfléchi :
Une antenne, souvent la même que celle utilisée pour l'émission, capte les ondes réfléchies.
4. Analyse du signal :
Le système mesure :
Le temps que mettent les ondes pour revenir, ce qui permet de déterminer la distance de l'objet.
Le décalage Doppler, qui permet de mesurer la vitesse relative de l'objet.
Applications du radar
Aviation : Suivi des aéronefs et gestion du trafic aérien.
Défense : Surveillance des zones stratégiques et détection des menaces.
Météorologie : Prévision des orages, suivi des cyclones et estimation des précipitations.
Navigation maritime : Évitement des collisions et suivi des côtes.
Automobile : Assistance à la conduite (freinage automatique, régulateurs adaptatifs).
Astronomie : Observation des planètes et des astéroïdes.
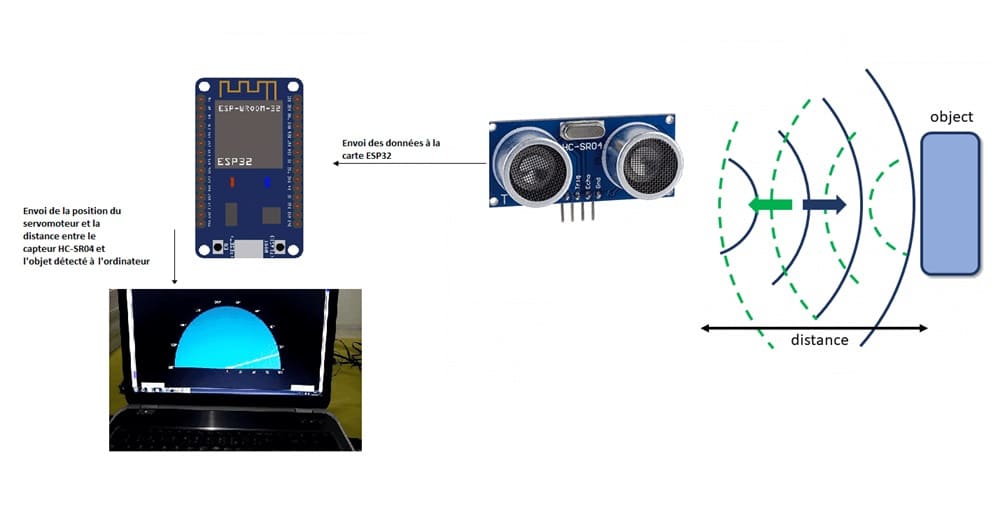
Comment il fonctionne le radar commandé par ESP32 ?
Ce projet utilise une carte ESP32 comme contrôleur principal pour gérer un capteur ultrason HC-SR04 et un servomoteur afin de simuler le fonctionnement d’un radar. Les données captées sont envoyées à un ordinateur pour affichage sous forme graphique.
Le système fonctionne en quatre étapes principales :
1. Rotation du capteur avec le servomoteur :
Le servomoteur effectue un balayage en déplaçant le capteur ultrason dans un arc (généralement de 0° à 180°).
L'ESP32 contrôle les angles de rotation du servomoteur.
2. Mesure des distances avec le HC-SR04 :
À chaque angle, le capteur envoie une impulsion ultrasonore et mesure le temps de retour de l'écho.
L'ESP32 calcule la distance de l'objet en fonction du temps mesuré.
3. Transmission des données :
Les mesures (angle et distance) sont envoyées à l'ordinateur via le port série (USB) ou Wi-Fi (si configuré).
4. Affichage graphique :
L'ordinateur affiche les données sous forme de graphique radar ou cartographie les objets détectés.
Les composants du radar
ESP32 :
Microcontrôleur programmable pour contrôler le capteur ultrason et le servomoteur, et transmettre les données mesurées (angle, distance) à l’ordinateur..
Capteur ultrason HC-SR04 :

Mesure la distance des objets en utilisant des ondes ultrasonores.
Servomoteur (SG90 ou similaire) :

Permet de faire pivoter le capteur ultrason pour balayer une zone.
Ordinateur :
Reçoit les données via le port série ou Wi-Fi et affiche les résultats (par exemple, sur une interface graphique comme Processing ou Python).
Câbles Dupont

Câbles de connexion utilisés pour relier les différents composants sur une breadboard.
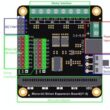
Breadboard

C'est une plateforme de prototypage utilisée pour connecter les composants électroniques sans soudure.
Schéma de câblage du radar
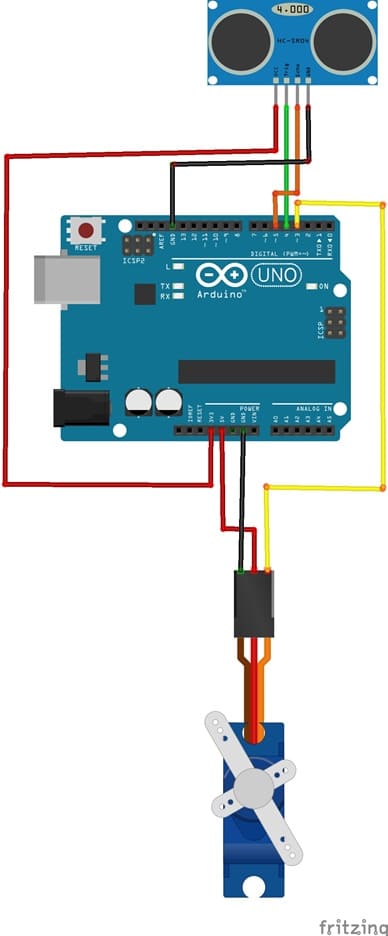
1- Pour le capteur sonore HC-SR04 on connecte:
la broche VCC à la broche 3.3V de la carte ESP32
la broche Trig à la broche D22 de la carte ESP32
la broche ECHO à la broche D21 de la carte ESP32
la broche GND à la broche GND de la carte ESP32
2- Pour le servomoteur on connecte:
fil rouge : fil de l’alimentation à relier à une énergie 5V
fil marron : fil à relier à la broche GND de la carte ESP32
fil Jaune : fil de signal de positionnement branché à la broche D23 de la carte ESP32
Programmation ESP32 avec Micropython
Voici le programme qui permet de :
1- calculer la distance entre le capteur HC-SR04 et l’objet détecté
2- faire tourner le servomoteur
3 - envoyer des données (position du servomoteur et la distance) de la carte ESP32 vers l’ordinateur.
Remarque: il faut utiliser ces deux bibliothèques : hcsr04 et servo.
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 |
import machine from hcsr04 import HCSR04 from machine import UART,Pin from servo import Servo import utime # Initialize a UART objects uart = UART(2, baudrate=115200) sensor = HCSR04(trigger_pin=22,echo_pin=21,echo_timeout_us=1000000) servo_pin = machine.Pin(23) my_servo = Servo(servo_pin) delay = 0.01 min = 15 max = 165 count = 1 while True: for i in range(min,max): my_servo.write_angle(i) distance = sensor.distance_cm() if distance > 1000 : distance=0 print(i,',',distance) utime.sleep_ms(60) for i in range(max, min, -1): my_servo.write_angle(i) utime.sleep_ms(60) distance = sensor.distance_cm() if distance > 1000 : distance=0 print(i,',',distance) |
Programme Python exécuté par l’ordinateur
Voici Un programme Processing pour lire les données série de la carte ESP32 et afficher un graphique radar.
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 159 160 161 |
# Python + Arduino-based Radar Plotter # # ** Works with any motor that outputs angular rotation # ** and with any distance sensor (HC-SR04, VL53L0x,LIDAR) # import numpy as np import matplotlib matplotlib.use('TkAgg') import matplotlib.pyplot as plt from matplotlib.widgets import Button import serial,sys,glob import serial.tools.list_ports as COMs # # ############################################ # Find Arudino ports, select one, then start communication with it ############################################ # def port_search(): if sys.platform.startswith('win'): # Windows ports = ['COM{0:1.0f}'.format(ii) for ii in range(1,256)] elif sys.platform.startswith('linux') or sys.platform.startswith('cygwin'): ports = glob.glob('/dev/tty[A-Za-z]*') elif sys.platform.startswith('darwin'): # MAC ports = glob.glob('/dev/tty.*') else: raise EnvironmentError('Machine Not pyserial Compatible') arduinos = [] for port in ports: # loop through to determine if accessible if len(port.split('Bluetooth'))>1: continue try: ser = serial.Serial(port) ser.close() arduinos.append(port) # if we can open it, consider it an arduino except (OSError, serial.SerialException): pass return arduinos arduino_ports = port_search() #ser = serial.Serial(arduino_ports[0],baudrate=115200) # match baud on Arduino port1="COM4" ser = serial.Serial(port1,baudrate=115200) ser.flush() # clear the port # ############################################ # Start the interactive plotting tool and # plot 180 degrees with dummy data to start ############################################ # fig = plt.figure(facecolor='k') win = fig.canvas.manager.window # figure window screen_res = win.wm_maxsize() # used for window formatting later dpi = 150.0 # figure resolution fig.set_dpi(dpi) # set figure resolution # polar plot attributes and initial conditions ax = fig.add_subplot(111,polar=True,facecolor='#006d70') ax.set_position([-0.05,-0.05,1.1,1.05]) r_max = 100.0 # can change this based on range of sensor ax.set_ylim([0.0,r_max]) # range of distances to show ax.set_xlim([0.0,np.pi]) # limited by the servo span (0-180 deg) ax.tick_params(axis='both',colors='w') ax.grid(color='w',alpha=0.5) # grid color ax.set_rticks(np.linspace(0.0,r_max,5)) # show 5 different distances ax.set_thetagrids(np.linspace(0.0,180.0,10)) # show 10 angles angles = np.arange(0,181,1) # 0 - 180 degrees theta = angles*(np.pi/180.0) # to radians dists = np.ones((len(angles),)) # dummy distances until real data comes in pols, = ax.plot([],linestyle='',marker='o',markerfacecolor = 'w', markeredgecolor='#EFEFEF',markeredgewidth=1.0, markersize=10.0,alpha=0.9) # dots for radar points line1, = ax.plot([],color='w', linewidth=4.0) # sweeping arm plot # figure presentation adjustments fig.set_size_inches(0.96*(screen_res[0]/dpi),0.96*(screen_res[1]/dpi)) plot_res = fig.get_window_extent().bounds # window extent for centering win.wm_geometry('+{0:1.0f}+{1:1.0f}'.\ format((screen_res[0]/2.0)-(plot_res[2]/2.0), (screen_res[1]/2.0)-(plot_res[3]/2.0))) # centering plot fig.canvas.toolbar.pack_forget() # remove toolbar for clean presentation fig.canvas.set_window_title('Arduino Radar') fig.canvas.draw() # draw before loop axbackground = fig.canvas.copy_from_bbox(ax.bbox) # background to keep during loop ############################################ # button event to stop program ############################################ def stop_event(event): global stop_bool stop_bool = 1 prog_stop_ax = fig.add_axes([0.85,0.025,0.125,0.05]) pstop = Button(prog_stop_ax,'Stop Program',color='#FCFCFC',hovercolor='w') pstop.on_clicked(stop_event) # button to close window def close_event(event): global stop_bool,close_bool if stop_bool: plt.close('all') stop_bool = 1 close_bool = 1 close_ax = fig.add_axes([0.025,0.025,0.125,0.05]) close_but = Button(close_ax,'Close Plot',color='#FCFCFC',hovercolor='w') close_but.on_clicked(close_event) fig.show() ############################################ # inifinite loop, constantly updating the # 180deg radar with incoming Arduino data ############################################ # start_word,stop_bool,close_bool = True,False,False while True: try: if stop_bool: # stops program fig.canvas.toolbar.pack_configure() # show toolbar if close_bool: # closes radar window plt.close('all') break ser_bytes = ser.readline() # read Arduino serial data decoded_bytes = ser_bytes.decode('utf-8') # decode data to utf-8 #data =ser_bytes.decode('utf-8') print(decoded_bytes) data = (decoded_bytes.replace('\r','')).replace('\n','').replace(' ','') #print(data.split(',')) if start_word: vals = [float(ii) for ii in data.split(',')] print(vals) if len(vals)<2: continue angle,dist = vals # separate into angle and distance if dist>r_max: dist = 0.0 # measuring more than r_max, it's likely inaccurate dists[int(angle)] = dist if angle % 5 ==0: # update every 5 degrees pols.set_data(theta,dists) fig.canvas.restore_region(axbackground) ax.draw_artist(pols) line1.set_data(np.repeat((angle*(np.pi/180.0)),2), np.linspace(0.0,r_max,2)) ax.draw_artist(line1) fig.canvas.blit(ax.bbox) # replot only data fig.canvas.flush_events() # flush for next plot else: if data=='Radar Start': # stard word on Arduno start_word = True # wait for Arduino to output start word print('Radar Starting...') else: continue except KeyboardInterrupt: plt.close('all') print('Keyboard Interrupt') break |
1- L’ESP32 pilote le servomoteur pour effectuer un balayage angulaire.
2- À chaque angle, le HC-SR04 mesure la distance des obstacles.
3- Les données (angle, distance) sont envoyées à l'ordinateur.
4- L'ordinateur trace un graphique en temps réel représentant les obstacles détectés dans l'arc balayé.
0 commentaire
laisser un commentaire
Passion de robotique

Tutoriels récents





Atelier robotique

Tutoriels populaires





Construction des robots

Tutoriels plus commentés



Bras robotique

Categories
Maison intelligente