Piloter un servomoteur par la carte Arduino UNO
Plan de tutoriel
1- Qu'est ce qu'un servomoteur ?
2- Matériel nécessaire pour contrôler le servomoteur par Arduino UNO
3- Schéma de câblage
4- Programmation de la carte Arduino UNO
Qu'est ce qu'un servomoteur ?
Un servomoteur est un type de moteur spécialement conçu pour se déplacer à des angles précis et pour maintenir une position stable. Il se distingue des moteurs classiques, car il permet un contrôle précis de la position, de la vitesse et de l’accélération, ce qui le rend utile pour les applications qui nécessitent une grande précision.
Composition d'un Servomoteur
Un servomoteur est composé de plusieurs éléments :
Un moteur : généralement un moteur à courant continu qui génère le mouvement.
Un système d’engrenages : réduit la vitesse et augmente le couple, ce qui permet un contrôle plus précis.
Un potentiomètre : mesure la position actuelle de l’axe de rotation et envoie cette information au contrôleur.
Un circuit de contrôle : compare la position actuelle avec la position cible (celle demandée par l’utilisateur) et ajuste le moteur en conséquence pour atteindre et maintenir cette position.
Fonctionnement
Les servomoteurs reçoivent un signal de contrôle, généralement un signal PWM (modulation de largeur d'impulsion), qui indique la position souhaitée. En fonction de la largeur de l’impulsion :
Une impulsion courte place le moteur à un angle bas (souvent 0°).
Une impulsion moyenne place le moteur au milieu de sa plage (par exemple 90° pour un servo 180°).
Une impulsion longue place le moteur à l’angle maximum (comme 180°).
Types de Servomoteurs
1- Servomoteurs standards (ou à rotation limitée) : limités à une plage de rotation, souvent entre 0° et 180° ou 0° et 270°.
2- Servomoteurs à rotation continue : peuvent tourner de manière continue dans les deux sens, comme un moteur classique, mais avec un contrôle de la vitesse en plus.
Applications des Servomoteurs
Les servomoteurs sont utilisés dans de nombreux domaines, notamment :
La robotique : pour les mouvements précis des bras, des pinces, etc.
Les modèles réduits : pour contrôler les gouvernails, les ailes et d'autres parties mobiles.
L’automatisation industrielle : pour des tâches de positionnement comme le tri ou l’assemblage.
Les appareils électroniques : caméras de sécurité, imprimantes, ou tout appareil nécessitant un mouvement précis.
En résumé, un servomoteur est un dispositif électromécanique permettant de contrôler la position avec une grande précision, ce qui le rend idéal pour des applications où un mouvement ou un positionnement contrôlé est nécessaire.
Matériel nécessaire pour contrôler le servomoteur par Arduino UNO
Pour contrôler un servomoteur avec une carte Arduino UNO, voici le matériel nécessaire :
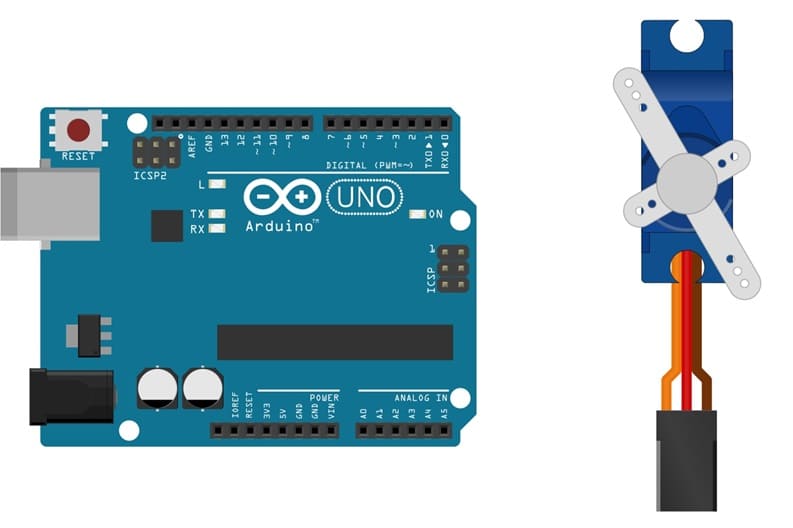
1. Carte Arduino UNO

La carte microcontrôleur qui sert à programmer et à envoyer les commandes au servomoteur. Elle dispose de broches numériques et analogiques pour connecter divers composants électroniques.
2. Servomoteur

Un moteur contrôlable en position. Il dispose généralement de trois fils :
Signal (pour recevoir les commandes de position de l'Arduino).
VCC (alimentation du moteur, généralement 5V).
GND (mise à la terre).
3. Câbles de Connexion (Jumper Wires)

Pour relier les broches de l’Arduino aux broches du servomoteur (signal, VCC, et GND). Des câbles mâle-mâle ou mâle-femelle sont utilisés selon les connecteurs disponibles.
Schéma de câblage
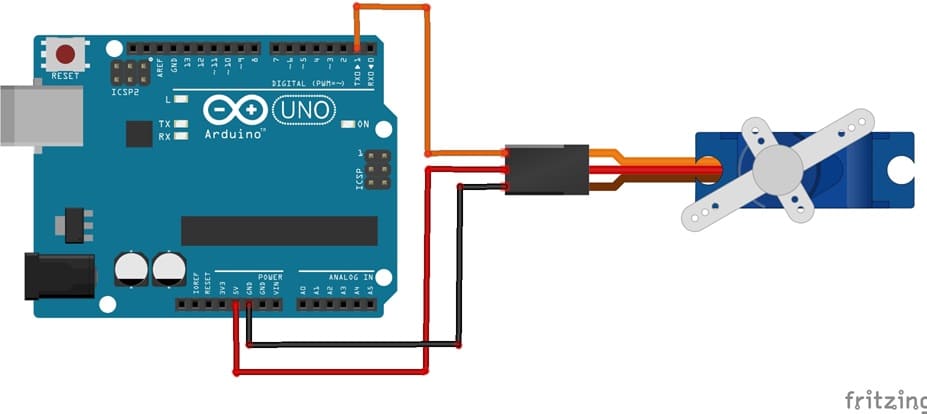
1- Connectez le fil de signal du servomoteur (souvent jaune ou orange) à une broche numérique de l’Arduino, par exemple D1.
2- Connectez le fil d'alimentation (VCC) du servomoteur (généralement rouge) au 5V de l’Arduino.
3- Connectez le fil de masse (GND) du servomoteur (souvent noir ou marron) à une broche GND de l’Arduino.
Programmation de la carte Arduino UNO
Le code ci-dessous utilise la bibliothèque Servo d’Arduino, qui simplifie le contrôle des servomoteurs.
1- Ouvrez l’IDE Arduino et créez un nouveau sketch.
2- Ajoutez le code suivant dans le sketch :
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 |
#include <Servo.h> Servo monServo; // Crée un objet Servo void setup() { monServo.attach(9); // Associe le servo à la broche numérique 9 } void loop() { monServo.write(0); // Positionne le servo à 0 degrés delay(1000); // Attendre 1 seconde monServo.write(90); // Positionne le servo à 90 degrés delay(1000); // Attendre 1 seconde monServo.write(180); // Positionne le servo à 180 degrés delay(1000); // Attendre 1 seconde } |
Explication du Code
#include : inclut la bibliothèque Servo, qui contient les fonctions pour contrôler le servomoteur.
Servo monServo; : crée un objet monServo qui représente le servomoteur.
monServo.attach(1); : associe le servomoteur à la broche 9 de l'Arduino.
monServo.write(angle); : envoie au servomoteur l'angle de rotation souhaité (entre 0° et 180°).
delay(1000); : attend 1 seconde entre chaque changement de position pour permettre au servo d’atteindre la position avant d’envoyer une nouvelle commande.
Étape 4 : Téléversement du Code
Connectez l’Arduino à votre ordinateur via un câble USB.
Dans l’IDE Arduino, sélectionnez Outils > Type de carte > Arduino UNO.
Sélectionnez le port COM correspondant à votre Arduino.
Cliquez sur Téléverser pour envoyer le code à l'Arduino.
Résultat
Le servomoteur se déplace successivement aux angles 0°, 90°, et 180°, avec une pause d’une seconde entre chaque position. Vous pouvez modifier les valeurs dans monServo.write() pour obtenir d’autres angles et ajuster les délais pour varier la vitesse de mouvement.
Cela vous permet de contrôler facilement la position du servomoteur avec une Arduino UNO.
17 commentaires

Novtra AI 20-10-2525
Its not my first time to pay a quick visit this web site, i am browsing this site dailly and obtain fastidious information from here everyday.
Polinortix 02-10-2525
When I initially left a comment I seem to have clicked on the -Notify me when new comments are added- checkbox and now every time a comment is added I receive 4 emails with the same comment. Is there an easy method you can remove me from that service? Kudos!
Lueur Flowdex 18-09-2525
I was recommended this blog by my cousin. I'm not sure whether this post is written by him as nobody else know such detailed about my problem. You're amazing! Thanks!
Briventhorix 11-09-2525
Howdy I am so thrilled I found your webpage, I really found you by error, while I was searching on Askjeeve for something else, Regardless I am here now and would just like to say cheers for a incredible post and a all round entertaining blog (I also love the theme/design), I don’t have time to read through it all at the moment but I have saved it and also added in your RSS feeds, so when I have time I will be back to read much more, Please do keep up the excellent work.
Affari 03-08-2525
Hello! This is kind of off topic but I need some advice from an established blog. Is it hard to set up your own blog? I'm not very techincal but I can figure things out pretty fast. I'm thinking about setting up my own but I'm not sure where to start. Do you have any ideas or suggestions? With thanks
QuantumLight 03-08-2525
You actually make it seem so easy with your presentation but I find this matter to be really something which I think I would never understand. It seems too complicated and very broad for me. I am looking forward for your next post, I will try to get the hang of it!
Nexalybit 03-08-2525
I'm gone to tell my little brother, that he should also go to see this weblog on regular basis to take updated from most recent information.
Easy Edge Index 30-07-2525
Hello there, just became aware of your blog through Google, and found that it's really informative. I'm gonna watch out for brussels. I will appreciate if you continue this in future. Many people will be benefited from your writing. Cheers!
Hidroelectrica Edge 27-07-2525
I know this if off topic but I'm looking into starting my own blog and was wondering what all is required to get set up? I'm assuming having a blog like yours would cost a pretty penny? I'm not very web smart so I'm not 100% sure. Any tips or advice would be greatly appreciated. Many thanks
NexitaliQ 21-07-2525
Hi there, I wish for to subscribe for this blog to get latest updates, thus where can i do it please help out.
Agrandarlo 20-07-2525
Genuinely when someone doesn't be aware of afterward its up to other people that they will help, so here it occurs.
FintrexApex 2.7 AI 06-07-2525
I don't know if it's just me or if everyone else experiencing problems with your website. It appears as though some of the written text in your posts are running off the screen. Can someone else please provide feedback and let me know if this is happening to them too? This may be a problem with my web browser because I've had this happen previously. Thanks
InvestCAN 05-07-2525
These are genuinely wonderful ideas in concerning blogging. You have touched some good factors here. Any way keep up wrinting.
Bluewave Nexor 02-07-2525
Good article. I certainly love this website. Stick with it!
Bitsahani 01-07-2525
Hello there! I just would like to offer you a huge thumbs up for the great info you have right here on this post. I'll be coming back to your web site for more soon.
Immediate Path 29-06-2525
Hi there to all, it's in fact a good for me to pay a visit this web page, it includes useful Information.
Aivora Trade 27-06-2525
Hey! This is kind of off topic but I need some advice from an established blog. Is it very hard to set up your own blog? I'm not very techincal but I can figure things out pretty fast. I'm thinking about setting up my own but I'm not sure where to begin. Do you have any points or suggestions? Appreciate it
laisser un commentaire
Passion de robotique

Tutoriels récents





Atelier robotique

Tutoriels populaires





Construction des robots

Tutoriels plus commentés




Bras robotique

Categories
Maison intelligente

But de ce site web
La robotique éducative joue un rôle important dans l'éducation des enfants et des jeunes en les aidant à acquérir des compétences en science et technologie.
Dans ce cadre notre site web représente une excellente ressource pour les parents, les enseignants et les enfants qui souhaitent découvrir la robotique.
Coordonnées
Zaouiet Kontech-Jemmel-Monastir-Tunisie
Articles populaires
Photos des articles





Site robotique réalisé par Mohamed Ali Haj Salah - Prof Info