Piloter trois LEDs par la carte ESP32
Plan du tutoriel
1- Quel est le rôle des LEDs ?
2- Les composants nécessaires pour contrôler trois LEDs par la carte ESP32
3- Montage de la carte ESP32 avec trois LEDs
4- Allumer trois LEDs par la carte ESP32
5- Allumer alternativement trois LEDs par la carte ESP32
Le rôle des LEDs dans les projets robotiques
Les LED (Light Emitting Diodes) jouent un rôle important dans les projets robotiques à plusieurs niveaux. Voici quelques-unes des utilisations courantes des LEDs dans les projets robotiques :
Indication visuelle : Les LEDs sont souvent utilisées pour fournir une indication visuelle de l'état ou du comportement du robot. Par exemple, une LED peut être programmée pour clignoter lorsque le robot est en marche, pour signaler une erreur ou pour représenter une condition spécifique.
Communication : Les LEDs peuvent servir à communiquer des informations entre le robot et son environnement ou avec les utilisateurs. Par exemple, différentes couleurs de LEDs peuvent être utilisées pour indiquer différents modes de fonctionnement ou pour transmettre des informations spécifiques.
Détection : Dans certains cas, les LEDs peuvent être utilisées pour détecter des objets ou des obstacles. En utilisant des capteurs appropriés, il est possible de mesurer la réflexion ou la réfraction de la lumière émise par une LED pour déterminer la présence d'objets à proximité.
Éclairage : Les LEDs peuvent être utilisées pour éclairer l'environnement du robot. Par exemple, dans des projets de robots explorateurs ou de drones, des LEDs lumineuses peuvent être utilisées pour éclairer les zones sombres ou pour aider à la vision nocturne.
Esthétique : Les LEDs peuvent également être utilisées à des fins esthétiques pour rendre le robot plus attrayant ou pour lui donner une apparence distinctive. Par exemple, des LEDs multicolores peuvent être utilisées pour créer des motifs lumineux ou des effets visuels.
Les composants nécessaires pour contrôler trois LEDs par la carte ESP32
Pour contrôler trois LEDs à l'aide de la carte ESP32, vous aurez besoin des composants suivants :
La carte ESP32 : un microcontrôleur à faible consommation d'énergie et à connectivité Wi-Fi et Bluetooth intégrée. Il est largement utilisé pour le développement de projets IoT (Internet des objets) en raison de sa polyvalence et de ses fonctionnalités avancées. L'ESP32 est également compatible avec l'IDE Arduino, ce qui facilite la programmation pour de nombreux développeurs. 
Trois LEDs : Choisissez les LEDs de votre choix, en prenant en compte leurs caractéristiques telles que la tension directe et le courant de fonctionnement. Assurez-vous d'avoir les résistances appropriées pour chaque LED afin de limiter le courant.
Trois résistances : Vous aurez besoin d'une résistance pour chaque LED afin de limiter le courant traversant les LEDs. La valeur de la résistance peut être calculée en utilisant la loi d'Ohm (R = (V - V_LED) / I_LED), où V est la tension d'alimentation de l'Arduino UNO, V_LED est la tension directe de la LED et I_LED est le courant recommandé pour la LED.
Câbles de connexion : Utilisez des fils de connexion pour relier les LEDs, les résistances et l'Arduino UNO selon le schéma de câblage que vous souhaitez mettre en place.
Breadboard (plaque d'essai) : Utilisez une plaque d'essai pour faciliter le câblage et la connexion des composants. 
Une fois que vous avez ces composants, vous pouvez connecter les cathodes (borne négative) des LEDs à travers les résistances aux broches numériques de la carte ESP32. Assurez-vous de connecter les résistances appropriées en série avec les cathodes des LEDs pour limiter le courant.
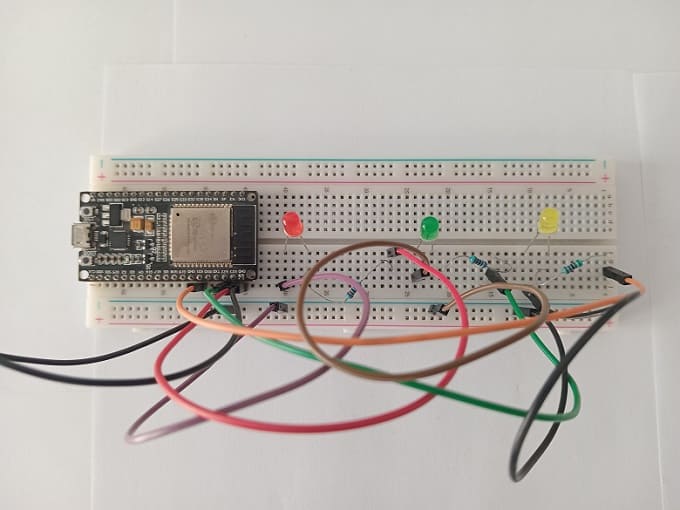
Montage de la carte ESP32 avec trois LEDs
Pour monter la carte ESP32 avec trois LEDs, on peut suivre les étapes suivantes:
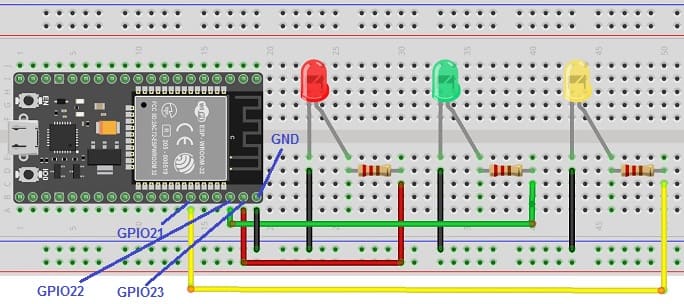
1- Placez la carte ESP32 sur la plaque d'essai.
2- Insérez les LEDs dans la plaque d'essai en les connectant aux broches de sortie de la carte ESP32. Par exemple, connectez la LED rouge à la broche GPIO 23, la LED verte à la broche GPIO 22 et la LED jaune à la broche GPIO 21. Assurez-vous d'insérer correctement les LED, en veillant à respecter la polarité (anode et cathode).
3- Connectez une résistance en série avec chaque LED. La résistance doit être connectée entre la broche GPIO correspondante et la borne positive (anode) de la LED.
4- Connectez la borne négative (cathode) de chaque LED à la masse (GND) de la carte ESP32.
5- Assurez-vous que toutes les connexions sont correctement réalisées et que rien n'est court-circuité.
Une fois le montage terminé, vous pouvez programmer la carte ESP32 pour contrôler les LEDs. Par exemple, vous pouvez utiliser le langage de programmation Micropython pour allumer et éteindre les LEDs dans des séquences spécifiques, en utilisant les fonctions de contrôle des broches GPIO de l'ESP32.
Allumer trois LEDs par la carte ESP32
Voici un exemple de code MicroPython pour allumer les trois LEDs connectées à une carte ESP32 :
|
1 2 3 4 5 6 7 8 9 10 11 12 |
from machine import Pin import time # Définition des broches pour chaque LED pin_led_rouge = Pin(23, Pin.OUT) pin_led_verte = Pin(22, Pin.OUT) pin_led_jaune = Pin(21, Pin.OUT) # allumer les trois LEDs pin_led_rouge.value(1) # Allumer la LED rouge pin_led_verte.value(1) # Allumer la LED verte pin_led_jaune.value(1) # Allumer la LED jaune |
Allumer alternativement trois LEDs par la carte ESP32
Pour allumer alternativement trois LEDs à l'aide d'une carte ESP32, programmer la carte ESP32 pour allumer alternativement les LEDs en utilisant le langage de programmation Micropython.
Voici un exemple de code MicroPython pour allumer alternativement trois LEDs connectées à une carte ESP32 :
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 |
from machine import Pin import time # Définition des broches pour chaque LED pin_led_rouge = Pin(23, Pin.OUT) pin_led_verte = Pin(22, Pin.OUT) pin_led_jaune = Pin(21, Pin.OUT) # Fonction pour allumer une LED spécifique et éteindre les autres def allumer_led(led): if led == 'rouge': pin_led_rouge.value(1) pin_led_verte.value(0) pin_led_jaune.value(0) elif led == 'verte': pin_led_rouge.value(0) pin_led_verte.value(1) pin_led_jaune.value(0) elif led == 'jaune': pin_led_rouge.value(0) pin_led_verte.value(0) pin_led_jaune.value(1) # Boucle principale while True: allumer_led('rouge') # Allumer la LED rouge time.sleep(1) allumer_led('verte') # Allumer la LED verte time.sleep(1) allumer_led('jaune') # Allumer la LED jaune time.sleep(1) |
0 commentaire
laisser un commentaire
Passion de robotique

Tutoriels récents





Atelier robotique

Tutoriels populaires





Construction des robots

Tutoriels plus commentés




Bras robotique

Categories
Maison intelligente






