Piloter le moteur pas à pas 17HS4401 par l’Arduino et le module L293D
Plan de tutoriel
1- Qu'est ce qu'un moteur pas à pas 17HS4401 ?
2- Qu'est ce que le module L293D ?
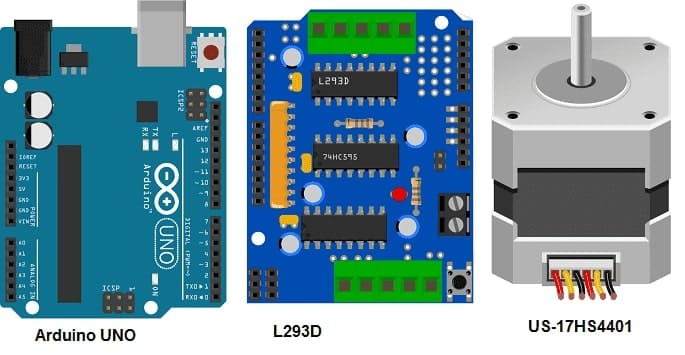
3- Matériel nécessaire pour contrôler le moteur pas à pas 17HS4401 par Arduino UNO
4- Schéma de câblage
5- Programmation de la carte Arduino UNO
Qu'est ce qu'un moteur pas à pas 17HS4401 ?
Le moteur pas à pas 17HS4401 est un moteur pas à pas de type NEMA 17 largement utilisé dans les applications d'électronique, d'automatisation et d'impression 3D.
Fonctionnement
Un moteur pas à pas fonctionne en divisant une rotation complète en un nombre fixe de pas (ici, 200 pas par révolution). En appliquant des impulsions électriques aux bobines dans un ordre spécifique, on contrôle la position de l'arbre du moteur avec précision.
Applications
Impression 3D : Utilisé pour les axes X, Y, Z et l'extrudeuse.
Machines CNC : Contrôle précis du mouvement pour les machines de découpe ou de gravure.
Robots : Pour les systèmes de rotation ou de déplacement.
Automatisation : Bras robotisés, convoyeurs, systèmes d'ouverture automatique.
Projets DIY : Tout système nécessitant un contrôle précis du mouvement.
Qu'est ce que le module L293D ?
Le module L293D est un pont en H utilisé pour contrôler des moteurs à courant continu (DC) ou des moteurs pas à pas à partir d'un microcontrôleur comme l'Arduino ou l'ESP32. Ce composant joue un rôle essentiel dans les systèmes où il est nécessaire de piloter des moteurs avec un courant ou une tension plus élevée que ce que le microcontrôleur peut fournir.
Applications
Robotique (voitures robotisées, bras robotisés).
Projets IoT nécessitant des moteurs.
Contrôle de ventilateurs ou de pompes.
Systèmes automatisés.
Avantages
Facilité d'utilisation pour les projets débutants.
Support pour deux moteurs en simultané.
Compatible avec une large gamme de tensions.
Matériel nécessaire pour contrôler le moteur pas à pas 17HS4401 par Arduino UNO
Carte Arduino UNO

Pour piloter et envoyer les signaux de contrôle.
Moteur pas à pas 17HS4401

Moteur pas à pas bipolaire NEMA 17 (1.8° par pas).
Module L293D
On utilise ce module pour piloter le moteur pas à pas 17HS4401.
Schéma de câblage
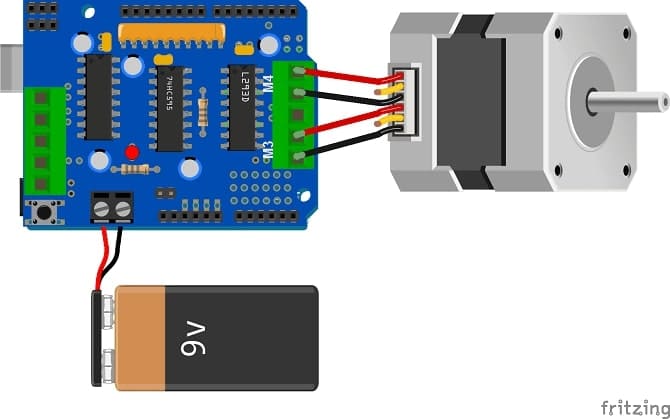
1- On connecte le module L293D à la carte Arduino UNO
2- On Connecte les broches du moteur pas à pas US-17HS4401 aux deux ports M3 et M4 du module L293D
3- On utilise une batterie de 9V comme une source d’alimentation.
Programmation de la carte Arduino UNO
Voici un exemple de code pour faire tourner le moteur dans un sens.
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 |
#include <AFMotor.h> // Number of steps per output rotation // Change this as per your motor's specification const int stepsPerRevolution = 200; // connect motor to port #2 (M3 and M4) AF_Stepper motor(stepsPerRevolution, 2); void setup() { Serial.begin(9600); Serial.println("Stepper test!"); motor.setSpeed(150); // 10 rpm } void loop() { Serial.println("Single coil steps"); motor.step(50, FORWARD, SINGLE); /*motor.step(100, BACKWARD, SINGLE); Serial.println("Double coil steps"); motor.step(100, FORWARD, DOUBLE); motor.step(100, BACKWARD, DOUBLE); Serial.println("Interleave coil steps"); motor.step(100, FORWARD, INTERLEAVE); motor.step(100, BACKWARD, INTERLEAVE); Serial.println("Micrsostep steps"); motor.step(100, FORWARD, MICROSTEP); motor.step(100, BACKWARD, MICROSTEP); */ } |

Passion de robotique

Tutoriels récents





Atelier robotique

Tutoriels populaires





Construction des robots

Tutoriels plus commentés




Bras robotique

Categories
Maison intelligente