Piloter le moteur pas à pas 17HS4401 par l’Arduino
Plan de tutoriel
1- Qu'est ce qu'un moteur pas à pas 17HS4401 ?
2- Matériel nécessaire pour contrôler le moteur pas à pas 17HS4401 par Arduino UNO
3- Schéma de câblage
4- Programmation de la carte Arduino UNO
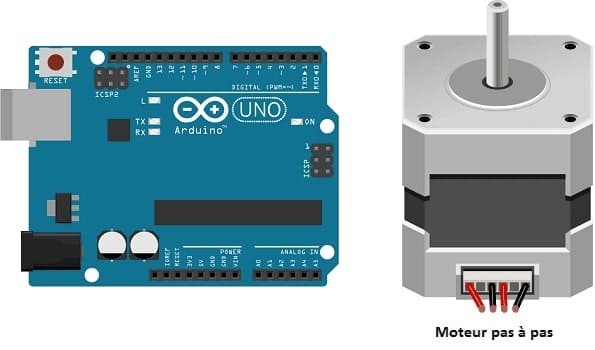
Qu'est ce qu'un moteur pas à pas 17HS4401 ?
Le moteur pas à pas 17HS4401 est un moteur pas à pas de type NEMA 17 largement utilisé dans les applications d'électronique, d'automatisation et d'impression 3D.
Fonctionnement
Un moteur pas à pas fonctionne en divisant une rotation complète en un nombre fixe de pas (ici, 200 pas par révolution). En appliquant des impulsions électriques aux bobines dans un ordre spécifique, on contrôle la position de l'arbre du moteur avec précision.
Applications
Impression 3D : Utilisé pour les axes X, Y, Z et l'extrudeuse.
Machines CNC : Contrôle précis du mouvement pour les machines de découpe ou de gravure.
Robots : Pour les systèmes de rotation ou de déplacement.
Automatisation : Bras robotisés, convoyeurs, systèmes d'ouverture automatique.
Projets DIY : Tout système nécessitant un contrôle précis du mouvement.
Matériel nécessaire pour contrôler le moteur pas à pas 17HS4401 par Arduino UNO
Carte Arduino UNO

Pour piloter et envoyer les signaux de contrôle.
Moteur pas à pas 17HS4401

Moteur pas à pas bipolaire NEMA 17 (1.8° par pas).
Carte CNC Shield V3
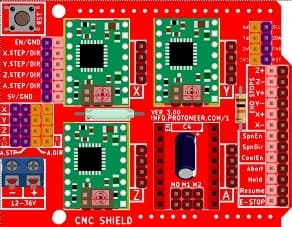
Permet de connecter facilement plusieurs moteurs pas à pas et pilotes.
Driver DRV8825 (x1 par moteur)

Pilote pour contrôler le moteur pas à pas via la CNC Shield.
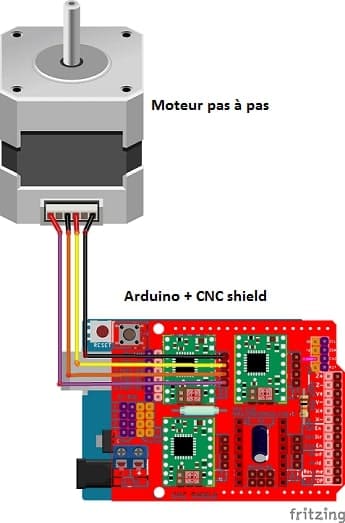
Schéma de câblage
Tout d’abord, il faut connecter la carte Arduino à la care CNC. Ensuite, on branche le moteur pas à pas à la carte CNC.
Programmation de la carte Arduino UNO
voici un code Arduino basique pour piloter un moteur pas à pas :
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 |
// pour la configuration du moteur pas à pas const int StepX = 2; const int DirX = 5; int pulseWidthMicros = 1000; // microseconds int millisBtwnSteps = 15000; void setup() { pinMode(StepX,OUTPUT); pinMode(DirX,OUTPUT); } void loop() { translationX(LOW,HIGH,100); //faire tourner le moteur pas à pas dans le sens de l'aiguille delay(1000); translationX(HIGH,LOW,100); //faire tourner le moteur pas à pas dans le sens de inverse l'aiguille delay(1000); } void translationX (uint8_t pin1, uint8_t pin2,int stepsPerRev1){ digitalWrite(DirX, pin1); // Enables the motor to move in a particular direction // Makes 200 pulses for making one full cycle rotation for (int i = 0; i < stepsPerRev1; i++) { digitalWrite(StepX, pin1); delayMicroseconds(pulseWidthMicros); digitalWrite(StepX, pin2); delayMicroseconds(millisBtwnSteps); } } |

Passion de robotique

Tutoriels récents





Atelier robotique

Tutoriels populaires





Construction des robots

Tutoriels plus commentés




Bras robotique

Categories
Maison intelligente





