Qu'est ce que le moteur pas à pas 28BYJ-48 ?

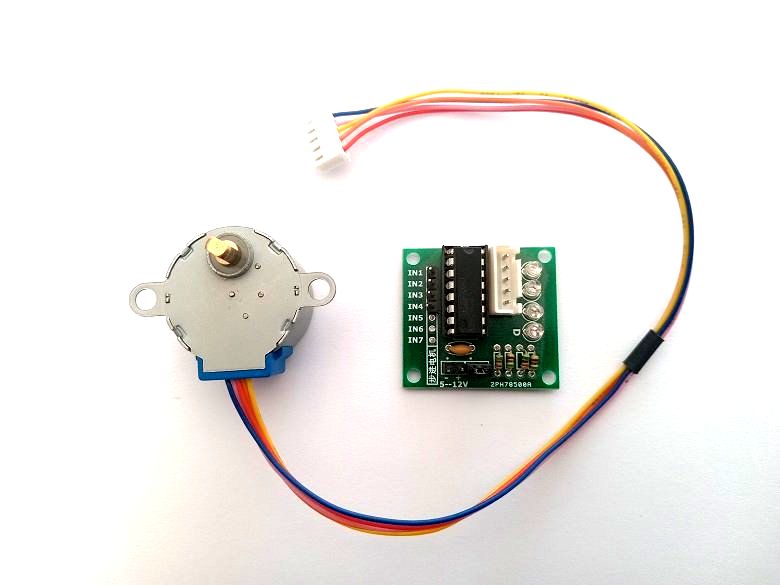
Le moteur pas à pas 28BYJ-48 est un petit moteur pas à pas unipolaire utilisé dans de nombreux projets électroniques. Il est largement utilisé dans les imprimantes 3D, les robots et les machines CNC en raison de sa petite taille, de sa faible consommation d'énergie et de son prix abordable.
Ce moteur est composé de 4 phases et possède un pas d'angle de 5.625 degrés. Il peut tourner dans les deux sens et peut effectuer une rotation de 360 degrés. La vitesse de rotation du moteur peut être contrôlée en ajustant la fréquence de l'impulsion envoyée au moteur.
Le moteur 28BYJ-48 est généralement piloté par un circuit intégré ULN2003, qui peut être alimenté avec une tension de 5V ou 12V. Le circuit ULN2003 est conçu pour fournir une tension élevée et un courant élevé pour les bobines du moteur pas à pas.
Le moteur pas à pas 28BYJ-48 est un choix populaire pour les projets de bricolage et les prototypes en raison de sa facilité d'utilisation et de son faible coût. Cependant, il convient de noter que ce moteur n'est pas adapté aux applications nécessitant une grande précision ou une grande puissance, car il ne peut pas fournir une grande quantité de couple.
Moteur pas à pas 28BYJ-48 et Arduino
Le moteur pas à pas 28BYJ-48 peut être facilement contrôlé avec une carte Arduino, qui fournit une interface simple pour envoyer des signaux de commande au moteur. Voici les étapes pour utiliser le moteur pas à pas 28BYJ-48 avec une carte Arduino :
- Connectez les fils du moteur pas à pas 28BYJ-48 aux bornes du module ULN2003. Les fils doivent être connectés aux bornes correspondantes sur le module, qui sont étiquetées IN1, IN2, IN3 et IN4.
- Connectez le module ULN2003 à la carte Arduino. Les broches IN1-IN4 du module doivent être connectées aux broches numériques de la carte Arduino.
- Téléchargez et installez la bibliothèque Stepper.h sur la carte Arduino. Cette bibliothèque fournit des fonctions pour contrôler facilement les moteurs pas à pas avec la carte Arduino.
- Utilisez la fonction Stepper() pour créer une instance du moteur pas à pas 28BYJ-48. La fonction Stepper() prend deux arguments : le nombre de pas que le moteur doit effectuer pour faire un tour complet, et les broches de la carte Arduino auxquelles les fils du moteur sont connectés.
- Utilisez les fonctions stepper.setSpeed() et stepper.step() pour contrôler la vitesse et la direction du moteur pas à pas 28BYJ-48. La fonction setSpeed() permet de définir la vitesse de rotation du moteur, tandis que la fonction step() permet de faire avancer ou reculer le moteur d'un certain nombre de pas.
Programmation du moteur pas à pas 28BYJ-48
Voici un exemple de code pour contrôler le moteur pas à pas 28BYJ-48 avec une carte Arduino et la bibliothèque Stepper.h :
Tout d'abord, incluez la bibliothèque Stepper.h :
Ensuite, définissez les broches de la carte Arduino auxquelles les fils du moteur sont connectés :
|
|
#define IN1 8 #define IN2 9 #define IN3 10 #define IN4 11 |
Créez ensuite une instance de la classe Stepper pour représenter le moteur pas à pas, en spécifiant le nombre de pas par tour complet et les broches auxquelles les fils du moteur sont connectés :
|
|
Stepper stepper(2048, IN1, IN3, IN2, IN4); |
Dans la fonction setup(), vous pouvez définir la vitesse du moteur en appelant la fonction setSpeed() :
|
|
void setup() { stepper.setSpeed(5); } |
Dans la fonction loop(), vous pouvez faire tourner le moteur pas à pas en appelant la fonction step() avec un argument spécifiant le nombre de pas à avancer :
|
|
void loop() { stepper.step(1024); delay(1000); stepper.step(-1024); delay(1000); } |
Cet exemple fera tourner le moteur pas à pas 28BYJ-48 dans un sens, puis dans l'autre, en avançant de 1024 pas à chaque fois, avec une pause d'une seconde entre chaque mouvement.
Bien sûr, vous pouvez adapter ce code pour contrôler le moteur pas à pas de la manière que vous souhaitez, en modifiant la vitesse, le nombre de pas et la direction du mouvement.
Rôle du moteur pas à pas 28BYJ-48 dans les projets robotiques
Le moteur pas à pas 28BYJ-48 est un composant essentiel dans de nombreux projets robotiques, en particulier ceux impliquant des mouvements précis et répétitifs. Voici quelques-uns des rôles les plus courants que joue le moteur pas à pas 28BYJ-48 dans les projets robotiques :
- Mouvements précis : Le moteur pas à pas 28BYJ-48 peut être utilisé pour contrôler avec précision les mouvements des robots, notamment dans les projets qui nécessitent des déplacements précis et répétitifs.
- Contrôle de la vitesse : Le moteur pas à pas 28BYJ-48 peut être utilisé pour contrôler la vitesse de déplacement du robot. En ajustant la fréquence de l'impulsion envoyée au moteur, la vitesse du robot peut être augmentée ou diminuée.
- Contrôle de la direction : Le moteur pas à pas 28BYJ-48 peut être utilisé pour contrôler la direction de déplacement du robot. En inversant la séquence de commande des bobines du moteur, la direction du robot peut être inversée.
- Contrôle de la position : Le moteur pas à pas 28BYJ-48 peut être utilisé pour contrôler la position du robot. En utilisant une technique appelée "micro-pas", le moteur peut être déplacé avec une précision extrême, ce qui permet au robot de se déplacer avec une grande précision et de maintenir une position précise.
En résumé, le moteur pas à pas 28BYJ-48 est un composant polyvalent et indispensable pour de nombreux projets robotiques. Il permet un contrôle précis de la vitesse, de la direction et de la position du robot, ce qui en fait un choix populaire pour de nombreux projets électroniques et robotiques.