Module contrôleur de moteurs L298N
Qu'est ce que le module L298N
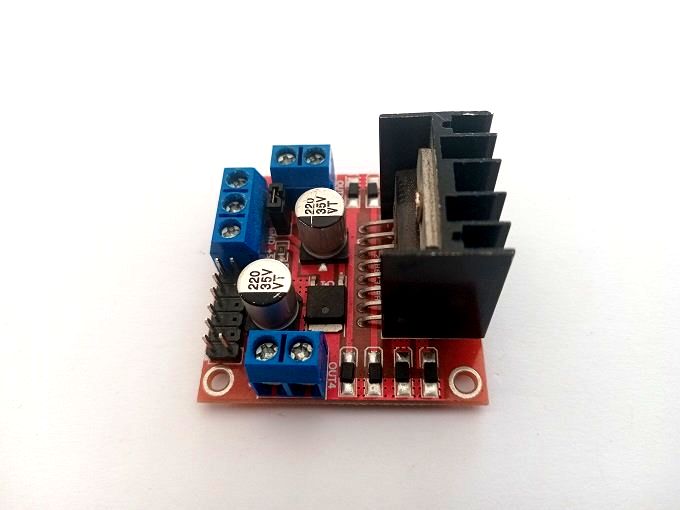
Le module contrôleur de moteurs L298N est un module électronique utilisé pour contrôler la vitesse et la direction de rotation des moteurs à courant continu (DC). Il est couramment utilisé dans les projets de robotique et d'automatisation pour contrôler les moteurs qui alimentent les roues, les bras mécaniques, les robots mobiles, etc.
Le module L298N est équipé de deux ponts en H, qui permettent de contrôler deux moteurs DC simultanément. Chaque pont en H est constitué de quatre transistors (deux NPN et deux PNP) qui peuvent commuter la polarité de la tension d'alimentation pour inverser la direction de rotation du moteur. Le module est également doté d'un circuit intégré de régulation de tension, qui permet de réguler la tension d'alimentation des moteurs.
Le module L298N est compatible avec les microcontrôleurs Arduino, Raspberry Pi et autres plateformes de prototypage. Il est facile à utiliser et peut être configuré en quelques étapes simples à l'aide des broches d'entrée et de sortie du module.
Le module L298N et la robotique
Le module contrôleur de moteurs L298N est largement utilisé dans les projets de robotique en raison de sa capacité à contrôler facilement la vitesse et la direction de rotation des moteurs à courant continu (DC). Les robots à roues, les bras mécaniques et les robots mobiles nécessitent souvent plusieurs moteurs pour fonctionner. Le module L298N permet de contrôler facilement plusieurs moteurs DC avec une grande précision.
Le module L298N est compatible avec les microcontrôleurs comme Arduino et Raspberry Pi, ce qui facilite son intégration dans les projets de robotique. En utilisant des entrées de commande numériques simples, les utilisateurs peuvent facilement configurer les moteurs pour qu'ils fonctionnent à différentes vitesses et directions. Il est également possible de faire varier la vitesse des moteurs en utilisant une modulation de largeur d'impulsion (PWM) pour une meilleure régulation de la vitesse.
En outre, le module L298N est équipé d'une protection contre les surcharges et les courts-circuits, ce qui le rend sûr à utiliser dans les projets de robotique. Cette protection permet d'éviter tout dommage aux moteurs et au module lui-même en cas de surcharge ou de court-circuit.
Comment le module L298N commande les moteurs ?
Le module contrôleur de moteurs L298N est utilisé pour contrôler la vitesse et la direction de rotation des moteurs à courant continu (DC). Voici comment commander les moteurs à l'aide du module L298N :
1- Connectez l'alimentation du module L298N à une source d'alimentation appropriée (généralement 5-12V DC). Assurez-vous que la polarité de l'alimentation est correcte.
2- Connectez les fils de sortie des moteurs DC aux bornes OUT1 et OUT2 pour le premier moteur, et OUT3 et OUT4 pour le deuxième moteur. Assurez-vous que la polarité des fils de sortie est correcte.
3- Connectez les broches d'entrée IN1, IN2, IN3 et IN4 du module L298N à des broches de sortie numériques d'un microcontrôleur (comme Arduino ou Raspberry Pi) ou à un autre système de commande approprié. Les broches IN1 et IN2 contrôlent le premier moteur, tandis que les broches IN3 et IN4 contrôlent le deuxième moteur.
4- Utilisez les broches d'entrée pour contrôler la vitesse et la direction de rotation des moteurs. Pour faire tourner le moteur dans un sens, utilisez les broches IN1 et IN2 pour le premier moteur, ou IN3 et IN4 pour le deuxième moteur. Pour faire tourner le moteur dans l'autre sens, inversez les signaux sur ces broches.
5- Pour contrôler la vitesse des moteurs, utilisez une modulation de largeur d'impulsion (PWM) en envoyant des signaux PWM sur les broches d'entrée IN1, IN2, IN3 et IN4. Cela permet de réguler la vitesse des moteurs à des vitesses variables.
Le module L298N et Arduino
Le module contrôleur de moteurs L298N est couramment utilisé avec Arduino pour contrôler la vitesse et la direction de rotation des moteurs à courant continu (DC) dans les projets de robotique et d'automatisation. Voici comment utiliser le module L298N avec Arduino :
1- Connectez le module L298N à votre carte Arduino en utilisant les broches de sortie numériques appropriées. Les broches IN1, IN2, IN3 et IN4 du module L298N doivent être connectées à des broches de sortie numériques de votre carte Arduino.
2- Connectez les fils de sortie des moteurs DC aux bornes OUT1 et OUT2 pour le premier moteur, et OUT3 et OUT4 pour le deuxième moteur du module L298N.
3- Alimentez le module L298N avec une source d'alimentation externe (5-12V DC) en connectant la borne d'alimentation positive (Vcc) et la borne d'alimentation négative (GND) du module L298N à votre source d'alimentation externe.
4- Programmez votre carte Arduino pour envoyer des signaux à haute ou basse tension aux broches IN1, IN2, IN3 et IN4, selon la direction de rotation souhaitée pour les moteurs. Pour faire tourner le moteur dans un sens, envoyez une tension élevée sur les broches IN1 et IN3, et une tension basse sur les broches IN2 et IN4. Pour faire tourner le moteur dans l'autre sens, inversez les signaux sur ces broches.
5- Utilisez la modulation de largeur d'impulsion (PWM) pour réguler la vitesse des moteurs. Envoyez des signaux PWM aux broches IN1, IN2, IN3 et IN4 pour ajuster la vitesse des moteurs à des vitesses variables.
Module L298N et ESP32
Le module contrôleur de moteurs L298N peut également être utilisé avec l'ESP32 pour contrôler les moteurs à courant continu. Voici les étapes à suivre :
1- Connectez le module L298N à votre ESP32 en utilisant les broches de sortie appropriées. Les broches IN1, IN2, IN3 et IN4 du module L298N doivent être connectées à des broches de sortie numériques de l'ESP32.
2- Connectez les fils de sortie des moteurs DC aux bornes OUT1 et OUT2 pour le premier moteur, et OUT3 et OUT4 pour le deuxième moteur du module L298N.
3- Alimentez le module L298N avec une source d'alimentation externe (5-12V DC) en connectant la borne d'alimentation positive (Vcc) et la borne d'alimentation négative (GND) du module L298N à votre source d'alimentation externe.
4- Programmez votre ESP32 pour envoyer des signaux à haute ou basse tension aux broches IN1, IN2, IN3 et IN4, selon la direction de rotation souhaitée pour les moteurs. Pour faire tourner le moteur dans un sens, envoyez une tension élevée sur les broches IN1 et IN3, et une tension basse sur les broches IN2 et IN4. Pour faire tourner le moteur dans l'autre sens, inversez les signaux sur ces broches.
5- Utilisez la modulation de largeur d'impulsion (PWM) pour réguler la vitesse des moteurs. Envoyez des signaux PWM aux broches IN1, IN2, IN3 et IN4 pour ajuster la vitesse des moteurs à des vitesses variables.
0 commentaire
laisser un commentaire
Passion de robotique

Tutoriels récents





Atelier robotique

Tutoriels populaires





Construction des robots

Tutoriels plus commentés



Bras robotique

Categories
Maison intelligente






