Le servomoteur
Définition du servomoteur
Un servomoteur est un dispositif électronique qui utilise un signal de commande pour positionner précisément un axe de rotation. Il est souvent utilisé dans les systèmes de contrôle de mouvement, tels que les robots, les drones, les imprimantes 3D et les machines-outils.
Le servomoteur est généralement composé d'un moteur électrique, d'un boîtier de réduction, d'un capteur de position et d'un circuit de commande. Le moteur électrique fournit la force de rotation, qui est réduite par le boîtier de réduction pour fournir un couple élevé et une faible vitesse de rotation. Le capteur de position mesure la position de l'axe de rotation et renvoie cette information au circuit de commande. Le circuit de commande utilise cette information pour régler la position de l'axe de rotation en fonction du signal de commande entrant.
Les servomoteurs sont très précis et peuvent être contrôlés avec une grande précision, ce qui les rend très utiles pour les applications nécessitant un contrôle précis de la position, de la vitesse et du couple. Ils sont également largement disponibles dans de nombreuses tailles et formes différentes pour répondre à une variété de besoins de conception.
Les types des servomoteurs
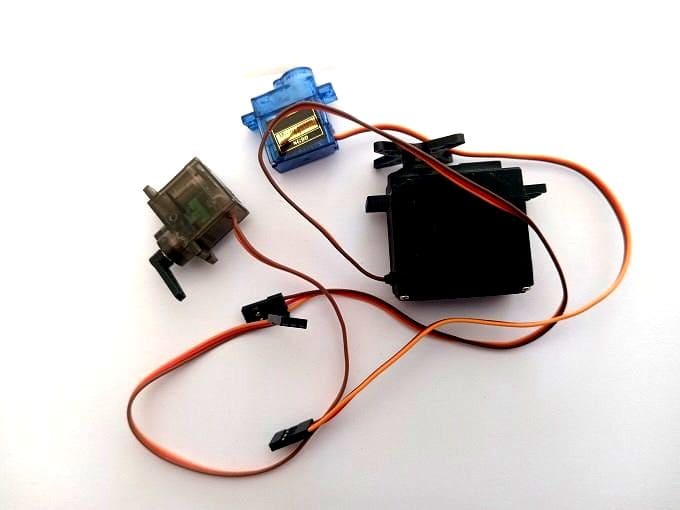
Il existe plusieurs types de servomoteurs, chacun ayant des caractéristiques et des avantages spécifiques. Voici quelques-uns des types de servomoteurs les plus courants :
MINI SERVOMOTEUR SG-90 SG90

Le mini servomoteur SG-90 (ou SG90) est un petit servomoteur analogique couramment utilisé dans les projets électroniques à petite échelle. Voici quelques-unes de ses caractéristiques :
Dimensions compactes : Le SG90 est un servomoteur de petite taille, mesurant environ 23 mm x 12 mm x 29 mm, ce qui le rend facilement intégrable dans des projets électroniques à petite échelle.
Poids léger : Le SG90 pèse environ 9 grammes, ce qui en fait un choix idéal pour les projets où le poids est important, tels que les drones et les avions télécommandés.
Couple modéré : Le SG90 peut fournir un couple
SERVOMOTEUR PRO 996R MG996 360°
Le servomoteur PRO 996R (ou MG996R) est un servomoteur numérique avec une rotation continue à 360 degrés. Voici quelques-unes de ses caractéristiques :
Rotation à 360 degrés : Contrairement aux servomoteurs standard qui ont une plage de rotation limitée, le MG996R peut tourner continuellement à 360 degrés. Cela le rend idéal pour les projets qui nécessitent une rotation continue, comme les caméras de surveillance, les robots et les véhicules télécommandés.
Couple élevé : Le MG996R est capable de fournir un couple élevé, pouvant aller jusqu'à 11 kg/cm. Cela le rend adapté aux applications qui nécessitent une force élevée, comme les machines de levage et les grues.
Précision : Le MG996R est un servomoteur numérique, ce qui signifie qu'il utilise un signal de commande numérique pour contrôler la position de l'axe de rotation. Cela lui permet d'offrir une précision de positionnement élevée.
Servomoteur Metal MG90S
Le servomoteur Metal MG90S est un servomoteur analogique de taille moyenne avec une structure en métal. Voici quelques-unes de ses caractéristiques :
Structure en métal : Le boîtier du MG90S est fabriqué en métal, ce qui le rend plus robuste et durable que les servomoteurs en plastique. Il peut résister à des impacts et des vibrations importants, ce qui le rend adapté aux environnements difficiles.
Dimensions compactes : Le MG90S est un servomoteur de taille moyenne, mesurant environ 22,8 mm x 12,2 mm x 28,5 mm. Il est facilement intégrable dans des projets électroniques à petite et moyenne échelle.
Couple modéré : Le MG90S peut fournir un couple modéré, pouvant aller jusqu'à 2,2 kg/cm. Il convient aux applications qui nécessitent une force modérée, telles que les drones et les robots de petite taille.
Vitesse élevée : Le MG90S peut atteindre une vitesse de rotation élevée, jusqu'à 0,1 seconde pour un angle de rotation de 60 degrés. Cela le rend adapté aux applications qui nécessitent une réponse rapide, comme les avions télécommandés et les véhicules télécommandés.
Comment fonctionner le servomoteur ?
Le fonctionnement du servomoteur est basé sur un système de boucle de rétroaction qui permet de régler la position de l'axe de rotation en fonction d'un signal de commande.
Voici les étapes générales de fonctionnement d'un servomoteur :
- Le signal de commande est envoyé au circuit de commande du servomoteur, qui comprend un microcontrôleur et un circuit de commande de moteur.
- Le microcontrôleur lit le signal de commande et compare la position actuelle de l'axe de rotation avec la position désirée.
- Le microcontrôleur envoie ensuite un signal de commande au circuit de commande de moteur, qui régule la vitesse et la direction du moteur pour faire tourner l'axe de rotation dans la direction appropriée.
- Un capteur de position, tel qu'un potentiomètre ou un codeur, est utilisé pour mesurer la position de l'axe de rotation en temps réel.
- Le signal de position mesuré est renvoyé au microcontrôleur, qui compare la position réelle avec la position désirée et calcule l'erreur de position.
- Le microcontrôleur ajuste alors le signal de commande envoyé au circuit de commande de moteur pour réduire l'erreur de position.
- Le processus se répète jusqu'à ce que la position réelle de l'axe de rotation corresponde à la position désirée.
Le servomoteur est capable de régler la position de l'axe de rotation de manière très précise grâce à ce système de boucle de rétroaction. Il est utilisé dans de nombreuses applications qui nécessitent un contrôle de position précis, tels que les robots, les drones, les imprimantes 3D, les machines-outils, les antennes paraboliques et les caméras de surveillance.
Comment commander le servomoteur par le microcontrôleur ?

Le servomoteur peut être commandé par le microcontrôleur en utilisant un signal de commande appelé "signal de modulation de largeur d'impulsion" ou PWM (Pulse Width Modulation). Le signal PWM est un signal numérique qui est utilisé pour contrôler la position de l'axe de rotation du servomoteur.
Voici les étapes pour commander un servomoteur à l'aide d'un microcontrôleur :
1- Tout d'abord, il faut identifier les broches de commande du servomoteur. Généralement, les servomoteurs ont trois broches : la broche d'alimentation (+), la broche de mise à la masse (-) et la broche de commande (signal).
2- Connectez la broche d'alimentation (+) du servomoteur à une source d'alimentation appropriée, généralement de 5V.
3- Connectez la broche de mise à la masse (-) du servomoteur à la masse de l'alimentation.
4- Connectez la broche de commande (signal) du servomoteur à une broche d'E/S (Entrée/Sortie) du microcontrôleur.
5- Dans le programme du microcontrôleur, utilisez la fonction PWM pour générer un signal PWM de fréquence appropriée (généralement de 50 Hz) et d'amplitude variable pour contrôler la position de l'axe de rotation du servomoteur.
6- Pour définir la position du servomoteur, modifiez la durée de l'impulsion PWM. La durée de l'impulsion PWM est généralement comprise entre 1 ms et 2 ms, et est proportionnelle à la position de l'axe de rotation. Par exemple, une impulsion de 1,5 ms peut correspondre à une position centrale de l'axe de rotation, tandis qu'une impulsion de 1 ms peut correspondre à une position maximale dans un sens et une impulsion de 2 ms peut correspondre à une position maximale dans l'autre sens.
7- Répétez l'envoi du signal PWM pour maintenir la position de l'axe de rotation souhaitée.
Pourquoi on utilise le servomoteur ?
Le servomoteur est utilisé dans de nombreuses applications où il est nécessaire de contrôler la position, la vitesse et la direction de rotation avec précision. Voici quelques raisons pour lesquelles on utilise le servomoteur :
1- Précision : Le servomoteur est capable de contrôler la position de l'axe de rotation avec une grande précision, ce qui en fait un choix idéal pour les applications qui nécessitent un contrôle de position précis, comme les robots, les imprimantes 3D et les machines-outils.
2- Contrôle de la vitesse : Le servomoteur est également capable de contrôler la vitesse de rotation de l'axe avec précision. Il peut donc être utilisé dans des applications où la vitesse est importante, comme les convoyeurs et les machines de conditionnement.
3- Couple élevé : Le servomoteur peut fournir un couple élevé, ce qui le rend adapté aux applications qui nécessitent une grande force, comme les grues et les machines de levage.
4- Réponse rapide : Le servomoteur peut réagir rapidement aux signaux de commande, ce qui en fait un choix idéal pour les applications qui nécessitent une réponse rapide, comme les drones et les avions télécommandés.
5- Faible consommation d'énergie : Le servomoteur consomme généralement moins d'énergie que les moteurs classiques, ce qui le rend adapté aux applications qui nécessitent une faible consommation d'énergie, comme les systèmes de contrôle de température et les systèmes de contrôle d'éclairage.
Le servomoteur et la robotique
Le servomoteur est largement utilisé dans la robotique en raison de sa capacité à contrôler précisément la position et le mouvement des articulations robotiques. En général, les robots ont besoin de mouvement précis et contrôlé, et le servomoteur est l'un des choix les plus populaires pour fournir ce mouvement.
Dans les bras et les jambes des robots, les servomoteurs sont utilisés pour fournir une rotation précise et contrôlée, en permettant aux joints de bouger dans une plage de mouvement définie. Les servomoteurs numériques peuvent être programmés pour fournir une précision de positionnement élevée et une vitesse de rotation rapide, ce qui les rend adaptés aux tâches qui nécessitent des mouvements rapides et précis.
De plus, les servomoteurs sont également utilisés dans les robots pour contrôler d'autres parties mobiles, comme les pinces et les outils. Les robots industriels utilisent souvent des servomoteurs pour contrôler les mouvements de leurs outils, tels que les soudeurs et les perceuses, ce qui permet un positionnement précis et une répétabilité élevée.
0 commentaire
laisser un commentaire
Passion de robotique

Tutoriels récents





Atelier robotique

Tutoriels populaires





Construction des robots

Tutoriels plus commentés




Bras robotique

Categories
Maison intelligente





