La carte ESP32 et le servomoteur
Plan de tutoriel
1- Qu'est ce qu'un servomoteur ?
2- Matériel nécessaire pour contrôler le servomoteur par la carte ESP32
3- Schéma de câblage
4- Programmation de la carte ESP32 avec Micropython
Qu'est ce qu'un servomoteur ?
Un servomoteur est un type de moteur spécialement conçu pour se déplacer à des angles précis et pour maintenir une position stable. Il se distingue des moteurs classiques, car il permet un contrôle précis de la position, de la vitesse et de l’accélération, ce qui le rend utile pour les applications qui nécessitent une grande précision.
Composition d'un Servomoteur
Un servomoteur est composé de plusieurs éléments :
Un moteur : généralement un moteur à courant continu qui génère le mouvement.
Un système d’engrenages : réduit la vitesse et augmente le couple, ce qui permet un contrôle plus précis.
Un potentiomètre : mesure la position actuelle de l’axe de rotation et envoie cette information au contrôleur.
Un circuit de contrôle : compare la position actuelle avec la position cible (celle demandée par l’utilisateur) et ajuste le moteur en conséquence pour atteindre et maintenir cette position.
Fonctionnement
Les servomoteurs reçoivent un signal de contrôle, généralement un signal PWM (modulation de largeur d'impulsion), qui indique la position souhaitée. En fonction de la largeur de l’impulsion :
Une impulsion courte place le moteur à un angle bas (souvent 0°).
Une impulsion moyenne place le moteur au milieu de sa plage (par exemple 90° pour un servo 180°).
Une impulsion longue place le moteur à l’angle maximum (comme 180°).
Types de Servomoteurs
1- Servomoteurs standards (ou à rotation limitée) : limités à une plage de rotation, souvent entre 0° et 180° ou 0° et 270°.
2- Servomoteurs à rotation continue : peuvent tourner de manière continue dans les deux sens, comme un moteur classique, mais avec un contrôle de la vitesse en plus.
Applications des Servomoteurs
Les servomoteurs sont utilisés dans de nombreux domaines, notamment :
La robotique : pour les mouvements précis des bras, des pinces, etc.
Les modèles réduits : pour contrôler les gouvernails, les ailes et d'autres parties mobiles.
L’automatisation industrielle : pour des tâches de positionnement comme le tri ou l’assemblage.
Les appareils électroniques : caméras de sécurité, imprimantes, ou tout appareil nécessitant un mouvement précis.
En résumé, un servomoteur est un dispositif électromécanique permettant de contrôler la position avec une grande précision, ce qui le rend idéal pour des applications où un mouvement ou un positionnement contrôlé est nécessaire.
Matériel nécessaire pour contrôler le servomoteur par la carte ESP32
Pour contrôler un servomoteur avec une carte Arduino UNO, voici le matériel nécessaire :
1. Carte Arduino UNO

La carte microcontrôleur qui sert à programmer et à envoyer les commandes au servomoteur. Elle dispose de broches numériques et analogiques pour connecter divers composants électroniques.
2. Servomoteur

Un moteur contrôlable en position. Il dispose généralement de trois fils :
Signal (pour recevoir les commandes de position de la carte ESP32 ).
VCC (alimentation du moteur, généralement 5V).
GND (mise à la terre).
3. Câbles de Connexion (Jumper Wires)

Pour relier les broches de la carte ESP32 aux broches du servomoteur (signal, VCC, et GND). Des câbles mâle-mâle ou mâle-femelle sont utilisés selon les connecteurs disponibles.
Schéma de câblage
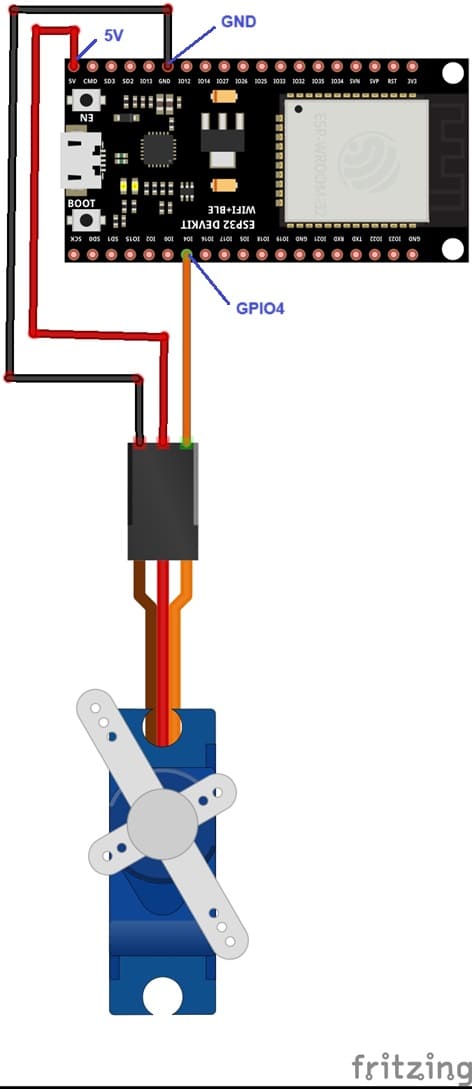
1- Connectez le fil de signal du servomoteur (souvent jaune ou orange) à une broche numérique de l’Arduino, par exemple GPIO4.
2- Connectez le fil d'alimentation (VCC) du servomoteur (généralement rouge) au 5V de la carte ESP32.
3- Connectez le fil de masse (GND) du servomoteur (souvent noir ou marron) à une broche GND de la carte ESP32.
Programmation de la carte ESP32 avec le Micropython
Voici un exemple de script MicroPython pour piloter un servomoteur :
|
1 2 3 4 5 6 7 8 9 |
import time import machine p4 = machine.Pin(4) servo = machine.PWM(p4,freq=50) # duty for servo is between 40 - 115 while True: servo.duty(40) # tourner le servomoteur à 30° time.sleep(2) # attendre 2s servo.duty(140) # tourner le servomoteur à 180° time.sleep(2) |
Explications du Code
PWM Configuration:
La fréquence de 50 Hz est standard pour les servomoteurs.
PWM(p4, freq=50) configure la broche GPIO 25 pour émettre un signal PWM.
Cycle de Travail (Duty Cycle):
Les servomoteurs reçoivent des signaux de largeur d'impulsion (PWM) pour se déplacer :
0° : impulsion de ~0.5 ms (environ 40 de cycle sur 1000).
180° : impulsion de ~2.5 ms (environ 140 de cycle sur 1000).
Test en Boucle:
La boucle alterne entre les angles 0° et 180°, avec une pause de 2 secondes.
0 commentaire
laisser un commentaire
Passion de robotique

Tutoriels récents





Atelier robotique

Tutoriels populaires





Construction des robots

Tutoriels plus commentés



Bras robotique

Categories
Maison intelligente






