La carte ESP32 et le moteur pas à pas 28BYJ-48
Tutorial plan
1- Définition du moteur pas à pas 28BYJ-48
2- Matériel nécessaire pour contrôler le moteur pas à pas 28BYJ-48 par ESP32
3- Schéma de câblage du système
4- Programmation de la carte ESP32 avec le Micropython
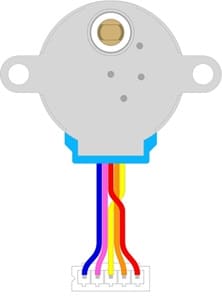
Définition du moteur pas à pas 28BYJ-48
Le moteur 28BYJ-48 est un moteur pas à pas unipolaire couramment utilisé dans des projets électroniques et robotiques, notamment en raison de son faible coût, de sa simplicité et de sa compatibilité avec de nombreux microcontrôleurs. Voici une définition détaillée :
Caractéristiques principales :
Type de moteur :
Moteur pas à pas unipolaire à 4 phases.
Il est équipé de 5 fils (ou parfois 6 fils dans des variantes spécifiques).
Structure interne :
Basé sur une combinaison de bobines et de dents rotoriques pour produire un mouvement pas à pas précis.
Le moteur est conçu avec un réducteur intégré (boîte de vitesses) qui augmente son couple mais réduit sa vitesse.
Spécifications courantes :
Angle de pas (sans réducteur) : 11,25° par pas.
Rapport de réduction : Approximativement 64:1, ce qui donne un angle de pas effectif d’environ 0,088° par pas à la sortie.
Tension nominale : Généralement 5V DC.
Courant : ~200 mA à pleine charge.
Connectivité :
Peut être contrôlé à l'aide d'un pilote de moteur, comme le module ULN2003, qui simplifie la commande des phases.
Applications typiques :
Robotique éducative.
Projets Arduino/Raspberry Pi.
Contrôle de précision dans de petites machines.
Indicateurs mécaniques (jauges, compteurs).
Ouvrants motorisés (ex. volets ou petits mécanismes).
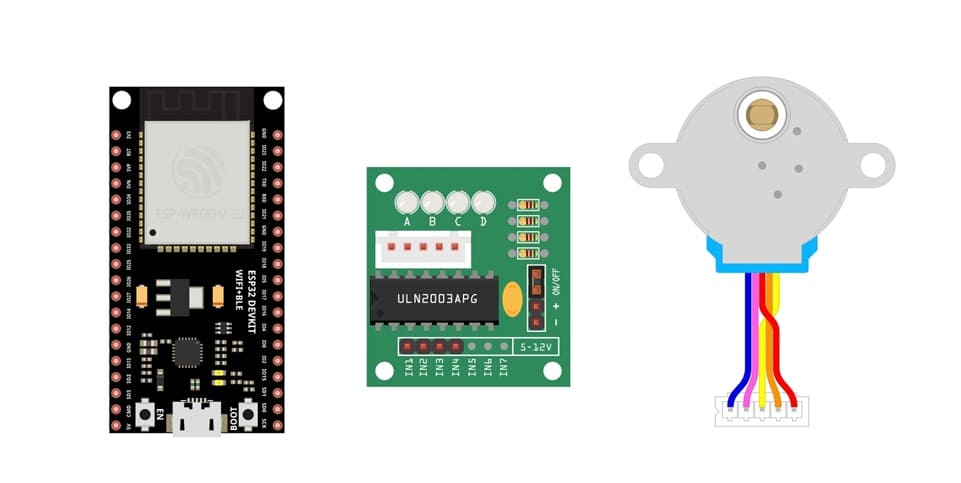
Matériel nécessaire pour contrôler le moteur pas à pas 28BYJ-48 par ESP32
Carte ESP32
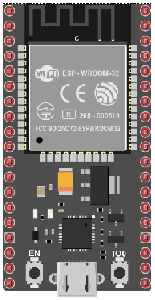
Une carte microcontrôleur basée sur l'ESP32 pour envoyer les signaux de commande.
Moteur pas à pas 28BYJ-48
C'est le moteur à contrôler.
Module pilote ULN2003
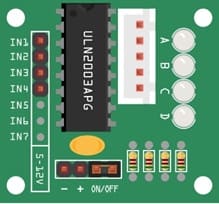
Ce module est conçu spécifiquement pour le 28BYJ-48.
Il permet de piloter les quatre phases du moteur via un ESP32 en limitant la puissance directe nécessaire.
Câbles de connexion

Des câbles (mâle-mâle, femelle-femelle ou mâle-femelle) pour connecter :
L'ESP32 au module ULN2003.
L'ULN2003 au moteur 28BYJ-48.
Plaque d'essai (Breadboard) :

On utilise la plaque d'essai pour faciliter le câblage des différents composants.
Alimentation du moteur :

Le moteur fonctionne généralement à 5V. Vous pouvez utiliser une alimentation externe (adaptateur secteur ou batterie) pour une meilleure stabilité.
Schéma de câblage du système
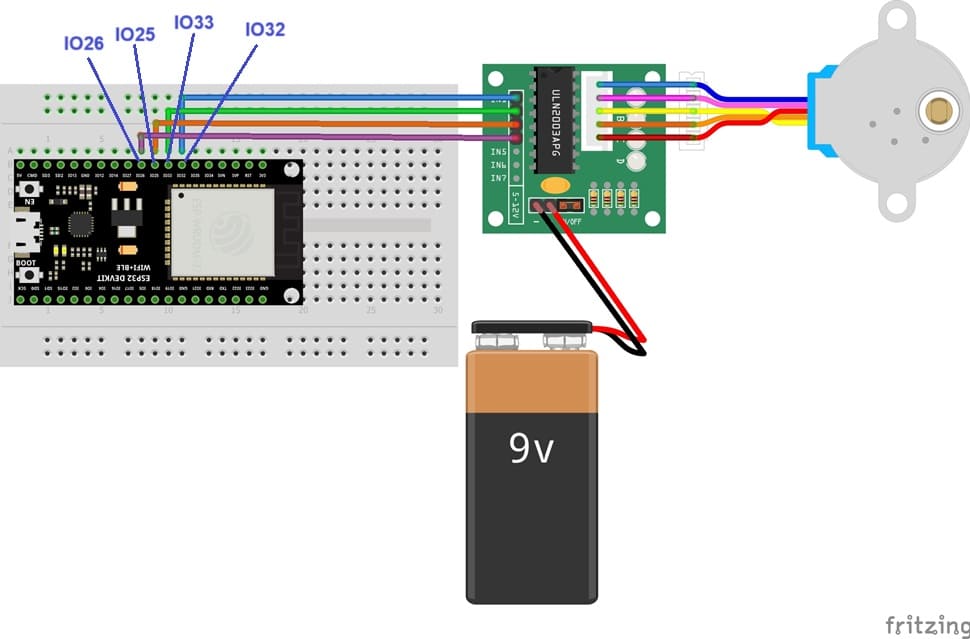
Connexion moteur - ULN2003 :
Branchez le connecteur 5 broches du moteur sur le module ULN2003.
Connexion ULN2003 - ESP32 :
Reliez les 4 broches IN du module ULN2003 à 4 GPIO de l’ESP32 (par exemple : GPIO 32, 33, 25, 26).
Connectez l’alimentation (5V) de l’ULN2003 à une source appropriée (Batterie 9V).
Programmation de la carte ESP32 avec le Micropython
Importer la bibliothèque Stepper pour contrôler le moteur pas à pas28BYJ-48.
Exemple de code pour piloter le moteur :
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 |
import Stepper from machine import Pin, ADC import time # for the ESP8266 # In1 = Pin(2,Pin.OUT) # IN1-> GPIO2 # In2 = Pin(0,Pin.OUT) # IN1-> GPIO0 # In3 = Pin(4,Pin.OUT) # IN1-> GPIO4 # In4 = Pin(5,Pin.OUT) # IN1-> GPIO5 # for ESP32 In1 = Pin(32,Pin.OUT) In2 = Pin(33,Pin.OUT) In3 = Pin(25,Pin.OUT) In4 = Pin(26,Pin.OUT) infrarouge = ADC(Pin(34)) s1 = Stepper.create(In1,In2,In3,In4, delay=1) while True: s1.step(500) # faire tourner le moteur pas a pas dans le sens de l'aiguille time.sleep(1) s1.step(500,-1) # faire tourner le moteur pas a pas dans le sens inverse de l'aiguille time.sleep(1) |
0 commentaire
laisser un commentaire
Passion de robotique

Tutoriels récents





Atelier robotique

Tutoriels populaires





Construction des robots

Tutoriels plus commentés





Bras robotique

Categories
Maison intelligente