Définition du Joystick
La manette joystick (ou simplement joystick) est un dispositif d'entrée pour les jeux vidéo et les simulations. Elle se compose d'un levier (stick) qui peut être incliné dans différentes directions pour contrôler les mouvements dans le jeu, ainsi que de plusieurs boutons pour effectuer différentes actions.
Le joystick peut être connecté à un ordinateur ou une console de jeu via un port USB ou un câble de connexion spécifique. Certains joysticks peuvent également se connecter sans fil via Bluetooth ou une autre technologie sans fil.
Les joysticks sont couramment utilisés pour les jeux de simulation, tels que les simulateurs de vol et de conduite, ainsi que pour les jeux de combat et d'action. Ils sont appréciés pour leur précision et leur capacité à fournir un contrôle précis des mouvements dans le jeu.
Joystick et microcontrolleurs
Les microcontrôleurs sont souvent utilisés avec des joysticks dans les projets électroniques pour contrôler des mouvements ou des actions en fonction des mouvements du joystick.
Pour cela, il est nécessaire de connecter le joystick aux entrées analogiques ou numériques du microcontrôleur en utilisant des fils ou des connecteurs appropriés. Le microcontrôleur peut ensuite être programmé pour lire les valeurs analogiques ou numériques provenant du joystick et contrôler les actions en conséquence.
Dans les projets plus avancés, les joysticks peuvent être utilisés en combinaison avec d'autres capteurs et actionneurs pour créer des systèmes de contrôle plus complexes. Par exemple, un joystick peut être utilisé pour contrôler un bras robotique ou un drone, en combinant les mouvements du joystick avec des données provenant d'autres capteurs tels que des gyroscopes ou des capteurs de distance.
En somme, les joysticks sont des dispositifs d'entrée polyvalents qui peuvent être utilisés en combinaison avec des microcontrôleurs pour créer une large gamme de projets électroniques et de systèmes de contrôle.
Joystick et Arduino
Le joystick peut être utilisé avec une carte Arduino pour contrôler les mouvements ou les actions dans un projet électronique. Pour cela, il faut connecter les broches de sortie du joystick aux broches d'entrée analogiques ou numériques de la carte Arduino en utilisant des fils ou des connecteurs appropriés.
Ensuite, il est possible de lire les valeurs analogiques ou numériques du joystick en utilisant la fonction analogRead() ou digitalRead() de la carte Arduino, selon le type de broches utilisées. En fonction de ces valeurs, il est possible de contrôler des servomoteurs, des moteurs pas à pas ou d'autres actionneurs pour effectuer des mouvements ou des actions.
Il est également possible de combiner le joystick avec d'autres capteurs et modules pour créer des projets plus avancés. Par exemple, on peut utiliser un joystick pour contrôler un robot, en combinant les mouvements du joystick avec des données provenant de capteurs tels que des capteurs de distance ou des capteurs de suivi de ligne.
Il existe également des bibliothèques pour Arduino qui facilitent l'utilisation de joysticks dans les projets électroniques, telles que la bibliothèque Joystick pour la carte Arduino Uno. Ces bibliothèques permettent de simplifier le code et d'ajouter des fonctionnalités supplémentaires pour contrôler les mouvements ou les actions en fonction des entrées du joystick.
Les broches de Joystick
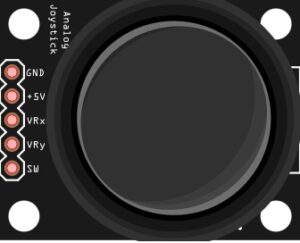
Les joysticks ont généralement trois broches : alimentation, masse et signal. Les broches sont généralement étiquetées comme suit :
- VCC ou +5V : Cette broche est connectée à l'alimentation positive (5 volts) du système.
- GND ou Ground : Cette broche est connectée à la masse du système.
- VRx et VRy : Ce sont les deux broches pour l'axe X et l'axe Y du joystick. Elles fournissent des signaux de sortie analogiques proportionnels à la position du joystick le long de chaque axe.*
- La broche SW (ou S) d'un joystick est généralement une broche de bouton qui est utilisée pour détecter lorsque le bouton du joystick est pressé. Lorsque le bouton du joystick est pressé, la broche SW est connectée à la masse et le microcontrôleur peut détecter cela comme un état logique bas (ou "0") sur la broche d'entrée numérique correspondante.
Lorsque vous connectez un joystick à un microcontrôleur, tel qu'une carte Arduino, vous connectez généralement les broches d'alimentation et de masse aux broches correspondantes sur le microcontrôleur, et connectez les broches VRx et VRy à deux des broches d'entrée analogique sur le microcontrôleur. La broche du bouton, si elle est présente, peut être connectée à une broche d'entrée numérique sur le microcontrôleur.
Programmation du Joystick avec IDE Arduino
La programmation du joystick avec l'IDE Arduino est relativement simple. Voici les étapes générales à suivre :
- Connectez le joystick à votre carte Arduino à l'aide de fils ou de connecteurs appropriés. Assurez-vous de bien connecter les broches de sortie du joystick aux broches d'entrée analogiques ou numériques de la carte Arduino.
- Ouvrez l'IDE Arduino sur votre ordinateur.
- Créez un nouveau sketch Arduino en sélectionnant "Nouveau" dans le menu "Fichier".
- Dans votre sketch, vous devez inclure la bibliothèque pour le joystick en utilisant la commande #include . Cette bibliothèque permet de lire les valeurs provenant du joystick.
- Déclarez les broches d'entrée que vous avez connectées à votre joystick à l'aide de la fonction pinMode(). Par exemple, si vous avez connecté la broche X du joystick à la broche A0 de votre carte Arduino, vous pouvez déclarer la broche A0 comme entrée analogique en utilisant la commande pinMode(A0, INPUT).
- Initialisez la bibliothèque Joystick avec la commande Joystick.begin(). Cela permet d'initialiser la communication avec le joystick.
- Dans la boucle loop() de votre sketch, utilisez la commande analogRead() pour lire les valeurs analogiques provenant du joystick. Par exemple, pour lire la valeur de la broche X, vous pouvez utiliser la commande int x = analogRead(A0);.
- En fonction des valeurs lues, vous pouvez contrôler les mouvements ou les actions de votre projet électronique. Par exemple, vous pouvez utiliser des commandes de mouvement pour contrôler des moteurs en fonction des mouvements du joystick.
- Compilez et téléversez votre sketch sur votre carte Arduino à l'aide de l'IDE Arduino.
En suivant ces étapes, vous devriez être en mesure de programmer votre joystick avec l'IDE Arduino et de contrôler les mouvements ou les actions de votre projet électronique en fonction des entrées du joystick.
Rôle du Joystick dans la commande des robots
Le joystick peut jouer un rôle important dans la commande des robots en offrant un moyen intuitif et facile à utiliser pour contrôler les mouvements et les actions du robot. Les joysticks peuvent être utilisés pour contrôler à la fois les mouvements linéaires et les mouvements angulaires du robot, ainsi que pour activer ou désactiver différentes fonctions ou modes de fonctionnement.
Les joysticks sont souvent utilisés dans la commande des robots mobiles, tels que les robots terrestres, aériens et sous-marins. Les joysticks peuvent être utilisés pour contrôler la vitesse et la direction de déplacement du robot, ainsi que pour contrôler la direction et l'inclinaison des bras ou des pinces du robot pour effectuer des tâches telles que la collecte d'objets ou l'exécution de travaux de maintenance.
Les joysticks peuvent également être utilisés pour contrôler les mouvements de la caméra ou d'autres capteurs du robot pour surveiller l'environnement et effectuer des tâches de reconnaissance. Les joysticks peuvent être utilisés en combinaison avec d'autres capteurs et systèmes de contrôle pour créer des robots plus avancés, tels que des robots autonomes qui peuvent naviguer dans des environnements inconnus sans intervention humaine.