Fabrication d’un radar commandé par Arduino UNO et HC-SR04

Plan du tutoriel
1- Qu'est ce qu'un radar ?
2- Comment il fonctionne le radar commandé par Arduino ?
3- Les composants du radar
4- Schéma de câblage du radar
5- Programmation du radar
Qu'est ce qu'un radar ?
Un radar (acronyme de Radio Détection et Range) est un système électronique qui utilise des ondes radio pour détecter, localiser et suivre des objets à distance. Le principe de fonctionnement du radar repose sur l'émission d'impulsions radio qui se propagent dans l'espace. Lorsqu'elles rencontrent un objet (comme un avion, un bateau, une voiture, ou des phénomènes météorologiques), ces ondes sont réfléchies vers l'émetteur. En analysant le temps écoulé entre l'émission et la réception des ondes réfléchies, ainsi que leur fréquence modifiée (effet Doppler), le radar peut déterminer la distance, la vitesse et parfois la taille ou la forme de l'objet détecté.
Applications du radar
1. Aviation et maritime : Les radars sont essentiels pour la navigation, permettant de détecter d'autres aéronefs, navires ou obstacles, surtout dans des conditions de visibilité réduite comme le brouillard ou la nuit.
2. Météorologie : Les radars météorologiques surveillent les conditions atmosphériques en détectant les précipitations, leur intensité et leur mouvement, aidant ainsi à prévoir les tempêtes et autres phénomènes météorologiques.
3. Sécurité routière : Les radars sont utilisés par la police pour mesurer la vitesse des véhicules et contrôler le respect des limitations de vitesse.
4. Applications militaires : Les radars militaires servent à détecter des avions, des missiles, des navires ou d'autres cibles potentielles, jouant un rôle crucial dans la défense et la surveillance.
5. Recherche et sauvetage : En permettant de localiser des objets ou des personnes dans des environnements difficiles, les radars facilitent les opérations de secours.
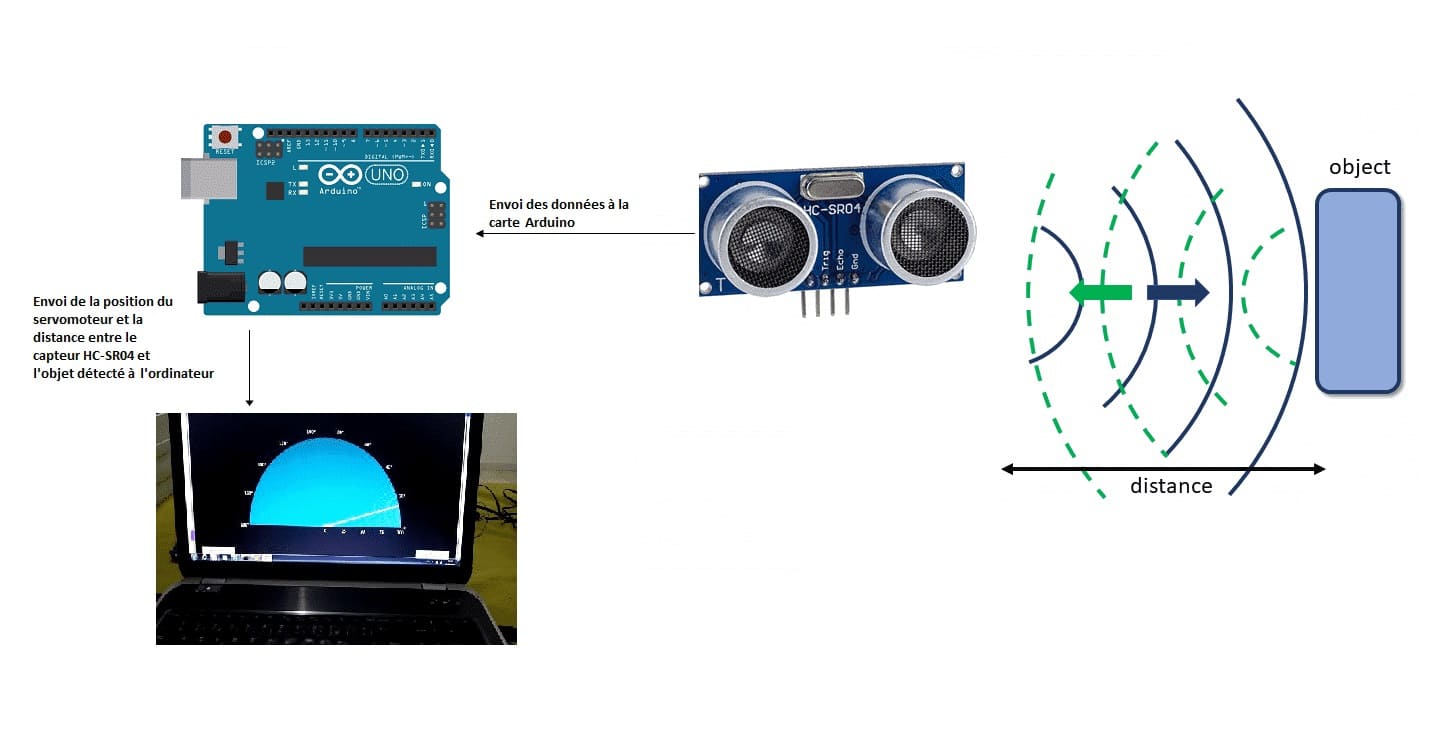
Comment il fonctionne le radar commandé par Arduino ?
Étape 1 : Emission et réception du signal ultrasonique
Le capteur HC-SR04 émet une impulsion sonore à travers son émetteur ultrasonique (Trigger).
Cette impulsion se réfléchit sur un objet et revient au capteur par le récepteur (Echo).
L’Arduino mesure le temps entre l’envoi et la réception du signal.
La distance est calculée.
Étape 2 : Balayage avec le servomoteur
Le servomoteur fait pivoter le capteur HC-SR04 dans une plage angulaire définie (par exemple, de 0° à 180°).
À chaque angle, l’Arduino mesure la distance détectée par le capteur.
Ces mesures sont envoyées à l'ordinateur pour un traitement et une visualisation.
Étape 3 : Visualisation sur ordinateur
Les données (distance et angle) sont transmises à l'ordinateur via le port série de l’Arduino.
Un logiciel (comme Processing) les utilise pour créer une représentation graphique en temps réel sous forme de radar circulaire.
Les composants du radar
Arduino UNO :

Elle Sert de microcontrôleur pour coordonner les capteurs et le servomoteur.
HC-SR04 :

C'est un capteur à ultrasons qui mesure la distance d’un objet en envoyant une onde sonore et en mesurant le temps qu’elle met à revenir.
Servomoteur :

Il permet de faire pivoter le capteur ultrasonique pour couvrir un angle donné.
Ordinateur :
Il reçoit les données via le port série pour afficher les résultats sous forme de radar graphique (par exemple, avec Processing ou Python).
Schéma de câblage du radar
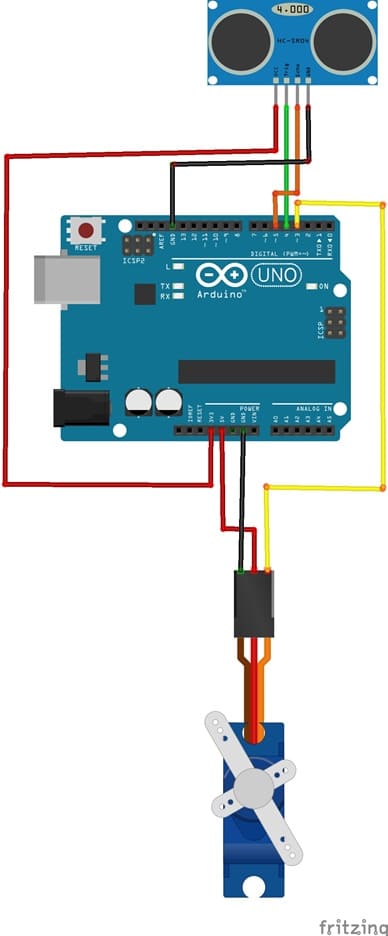
1. HC-SR04 :
Trigger → Pin numérique de l’Arduino (D4)
Echo → Pin numérique (D5)
VCC → 5V de l’Arduino
GND → GND de l’Arduino
2. Servomoteur :
Signal → Pin numérique (D3)
VCC → 5V de l’Arduino
GND → GND commun avec l’Arduino
Programmation du radar
1- Exemple de code Arduino
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 |
#include <Servo.h> Servo servo_1; // servo controller (multiple can exist) int trig = 4; // trig pin for HC-SR04 int echo = 5; // echo pin for HC-SR04 int servo_pin = 3; // PWM pin for servo control int pos = 0; // servo starting position float duration,distance; void setup() { Serial.begin(115200); Serial.println("Radar Start"); servo_1.attach(servo_pin); // start servo control pinMode(trig,OUTPUT); pinMode(echo,INPUT); } void loop() { for (pos = 0; pos <= 180; pos += 1) { // goes from 0 degrees to 180 degrees // in steps of 1 degree servo_1.write(pos); // tell servo to go to position in variable 'pos' delay(60); // delay to allow the servo to reach the desired position dist_calc(pos); } for (pos = 180; pos >= 0; pos -= 1) { // goes from 180 degrees to 0 degrees servo_1.write(pos); // tell servo to go to position in variable 'pos' delay(60); dist_calc(pos); } } float dist_calc(int pos){ // trigger 40kHz pulse for ranging digitalWrite(trig,LOW); delayMicroseconds(2); digitalWrite(trig,HIGH); delayMicroseconds(10); digitalWrite(trig,LOW); // convert from duration for pulse to reach detector (microseconds) to range (in cm) duration = pulseIn(echo,HIGH); // duration for pulse to reach detector (in microseconds) distance = 100.0*(343.0*(duration/2.0))/1000000.0; // 100.0*(speed of sound*duration/2)/microsec conversion Serial.print(pos); // position of servo motor Serial.print(","); // comma separate variables Serial.println(distance); // print distance in cm } |
2- Visualisation dans l'ordinateur (avec Python)
Voici un exemple pour afficher un radar graphique avec Python :
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 |
# Python + Arduino-based Radar Plotter # # ** Works with any motor that outputs angular rotation # ** and with any distance sensor (HC-SR04, VL53L0x,LIDAR) # import numpy as np import matplotlib matplotlib.use('TkAgg') import matplotlib.pyplot as plt from matplotlib.widgets import Button import serial,sys,glob import serial.tools.list_ports as COMs # # ############################################ # Find Arudino ports, select one, then start communication with it ############################################ # def port_search(): if sys.platform.startswith('win'): # Windows ports = ['COM{0:1.0f}'.format(ii) for ii in range(1,256)] elif sys.platform.startswith('linux') or sys.platform.startswith('cygwin'): ports = glob.glob('/dev/tty[A-Za-z]*') elif sys.platform.startswith('darwin'): # MAC ports = glob.glob('/dev/tty.*') else: raise EnvironmentError('Machine Not pyserial Compatible') arduinos = [] for port in ports: # loop through to determine if accessible if len(port.split('Bluetooth'))>1: continue try: ser = serial.Serial(port) ser.close() arduinos.append(port) # if we can open it, consider it an arduino except (OSError, serial.SerialException): pass return arduinos arduino_ports = port_search() ser = serial.Serial(arduino_ports[0],baudrate=115200) # match baud on Arduino ser.flush() # clear the port # ############################################ # Start the interactive plotting tool and # plot 180 degrees with dummy data to start ############################################ # fig = plt.figure(facecolor='k') win = fig.canvas.manager.window # figure window screen_res = win.wm_maxsize() # used for window formatting later dpi = 150.0 # figure resolution fig.set_dpi(dpi) # set figure resolution # polar plot attributes and initial conditions ax = fig.add_subplot(111,polar=True,facecolor='#006d70') ax.set_position([-0.05,-0.05,1.1,1.05]) r_max = 100.0 # can change this based on range of sensor ax.set_ylim([0.0,r_max]) # range of distances to show ax.set_xlim([0.0,np.pi]) # limited by the servo span (0-180 deg) ax.tick_params(axis='both',colors='w') ax.grid(color='w',alpha=0.5) # grid color ax.set_rticks(np.linspace(0.0,r_max,5)) # show 5 different distances ax.set_thetagrids(np.linspace(0.0,180.0,10)) # show 10 angles angles = np.arange(0,181,1) # 0 - 180 degrees theta = angles*(np.pi/180.0) # to radians dists = np.ones((len(angles),)) # dummy distances until real data comes in pols, = ax.plot([],linestyle='',marker='o',markerfacecolor = 'w', markeredgecolor='#EFEFEF',markeredgewidth=1.0, markersize=10.0,alpha=0.9) # dots for radar points line1, = ax.plot([],color='w', linewidth=4.0) # sweeping arm plot # figure presentation adjustments fig.set_size_inches(0.96*(screen_res[0]/dpi),0.96*(screen_res[1]/dpi)) plot_res = fig.get_window_extent().bounds # window extent for centering win.wm_geometry('+{0:1.0f}+{1:1.0f}'.\ format((screen_res[0]/2.0)-(plot_res[2]/2.0), (screen_res[1]/2.0)-(plot_res[3]/2.0))) # centering plot fig.canvas.toolbar.pack_forget() # remove toolbar for clean presentation fig.canvas.set_window_title('Arduino Radar') fig.canvas.draw() # draw before loop axbackground = fig.canvas.copy_from_bbox(ax.bbox) # background to keep during loop ############################################ # button event to stop program ############################################ def stop_event(event): global stop_bool stop_bool = 1 prog_stop_ax = fig.add_axes([0.85,0.025,0.125,0.05]) pstop = Button(prog_stop_ax,'Stop Program',color='#FCFCFC',hovercolor='w') pstop.on_clicked(stop_event) # button to close window def close_event(event): global stop_bool,close_bool if stop_bool: plt.close('all') stop_bool = 1 close_bool = 1 close_ax = fig.add_axes([0.025,0.025,0.125,0.05]) close_but = Button(close_ax,'Close Plot',color='#FCFCFC',hovercolor='w') close_but.on_clicked(close_event) fig.show() ############################################ # inifinite loop, constantly updating the # 180deg radar with incoming Arduino data ############################################ # start_word,stop_bool,close_bool = False,False,False while True: try: if stop_bool: # stops program fig.canvas.toolbar.pack_configure() # show toolbar if close_bool: # closes radar window plt.close('all') break ser_bytes = ser.readline() # read Arduino serial data decoded_bytes = ser_bytes.decode('utf-8') # decode data to utf-8 data = (decoded_bytes.replace('\r','')).replace('\n','') #print(data.split(',')) if start_word: vals = [float(ii) for ii in data.split(',')] print(vals) if len(vals)<2: continue angle,dist = vals # separate into angle and distance if dist>r_max: dist = 0.0 # measuring more than r_max, it's likely inaccurate dists[int(angle)] = dist if angle % 5 ==0: # update every 5 degrees pols.set_data(theta,dists) fig.canvas.restore_region(axbackground) ax.draw_artist(pols) line1.set_data(np.repeat((angle*(np.pi/180.0)),2), np.linspace(0.0,r_max,2)) ax.draw_artist(line1) fig.canvas.blit(ax.bbox) # replot only data fig.canvas.flush_events() # flush for next plot else: if data=='Radar Start': # stard word on Arduno start_word = True # wait for Arduino to output start word print('Radar Starting...') else: continue except KeyboardInterrupt: plt.close('all') print('Keyboard Interrupt') break |
Lorsque le programme tourne, le radar effectue un balayage dans une plage angulaire donnée, en mesurant les distances et en affichant les résultats sur l'ordinateur sous forme de points représentant les objets détectés.
1 commentaire

website 31-07-2525
This site truly has all the information I needed about this subject and didn't know who to ask.
laisser un commentaire
Passion de robotique

Tutoriels récents





Atelier robotique

Tutoriels populaires





Construction des robots

Tutoriels plus commentés




Bras robotique

Categories
Maison intelligente





