ESP32-CAM robot voiture commandé par Wifi

Plan de tutoriel
1- Fonctionnement du robot voiture équipé de la carte ESP32-CAM
2- Matériel nécessaire
3- Montage du robot
4- Programmation de la carte ESP32-CAM
Fonctionnement du robot voiture équipé de la carte ESP32-CAM
Le robot voiture utilise une carte ESP32-CAM pour gérer à la fois le contrôle des mouvements et la capture/transmission vidéo en temps réel. Le système de relais est utilisé pour piloter les moteurs DC qui permettent le déplacement du robot. Grâce à la connectivité Wi-Fi intégrée, le robot peut être contrôlé à distance via un smartphone ou un ordinateur en utilisant un serveur web ou une application dédiée.
Fonctionnement détaillé :
1- Mouvement contrôlé par relais :
Les relais sont utilisés pour commander les moteurs DC en changeant leur polarité :
Lorsque le relais bascule dans une certaine position, le courant passe dans une direction, ce qui fait tourner le moteur dans un sens (par exemple, marche avant).
Lorsque le relais bascule dans l’autre position, le courant passe dans la direction opposée, inversant ainsi la rotation du moteur (marche arrière).
L’état ON/OFF des relais est commandé directement par les broches GPIO de l’ESP32-CAM.
2- Commandes du robot via Wi-Fi :
L’ESP32-CAM héberge un serveur web accessible via une connexion Wi-Fi.
L'utilisateur peut se connecter au serveur web à partir d’un smartphone ou d’un ordinateur.
Une interface utilisateur (comme une page web) permet de commander le robot :
- Avancer, tourner à gauche ou à droite.
- Contrôler la caméra pour visualiser l’environnement en temps réel.
3- Transmission vidéo en temps réel :
La caméra intégrée à l’ESP32-CAM capture un flux vidéo en temps réel.
Le flux est envoyé via Wi-Fi et peut être visualisé sur l’interface utilisateur (page web).
Cela permet à l'utilisateur de piloter le robot en fonction des images capturées, offrant un contrôle à distance précis.
Matériel nécessaire
ESP32-CAM :

La carte ESP32-CAM est un microcontrôleur avec connectivité Wi-Fi et une caméra intégrée.
Elle sert à gérer le flux vidéo en temps réel, l'interface utilisateur (serveur web) et le contrôle des relais.
Relais (2x) :

Les relais Permettent de contrôler les moteurs DC en marche avant et arrière en basculant l’alimentation des moteurs.
Il fonctionnent comme des interrupteurs commandés par l’ESP32-CAM.
Kit robot voitures de 2 roues

Ce Kit est équipé de
a- Moteurs à courant continu (DC) :
Deux moteurs DC connectés aux roues pour le déplacement du robot.
Leur sens de rotation détermine la direction du robot.
b- Châssis avec deux roues :
Support mécanique du robot qui inclut deux roues motrices et, souvent, un troisième support (comme une roulette pivotante) pour la stabilité.
Batterie ou pack d’alimentation :

Fournit l’énergie nécessaire pour l’ESP32-CAM et les moteurs.
Une alimentation séparée peut être utilisée pour les moteurs si leur courant est élevé.
Fils de connection :

Des fils électriques seront nécessaires pour relier les différents composants du robot entre eux.
Breadboard (Plaque d'essai) :

Une breadboard est utile pour créer un circuit temporaire et connecter facilement les composants entre eux.
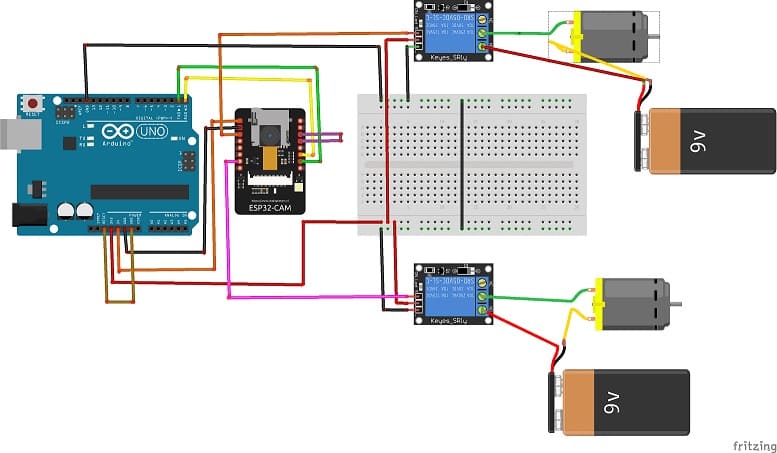
Montage du robot
Programmation de la carte ESP32-CAM
Voici les fichiers programme pour la carte ESP32-CAM:
Télécharger le projet
Interface utilisateur (via serveur web) :
L’interface web affichée sur un navigateur (smartphone ou ordinateur) inclut :
1- Un écran de flux vidéo en direct provenant de la caméra de l’ESP32-CAM.
2- Des boutons de commande pour piloter le robot :
- Avancer
- Tourner à gauche
- Tourner à droite
- Stop
0 commentaire
laisser un commentaire
Passion de robotique

Tutoriels récents




Atelier robotique

Tutoriels populaires





Construction des robots

Tutoriels plus commentés




Bras robotique

Categories
Maison intelligente






