Qu'est ce qu' un capteur de flamme KY-026
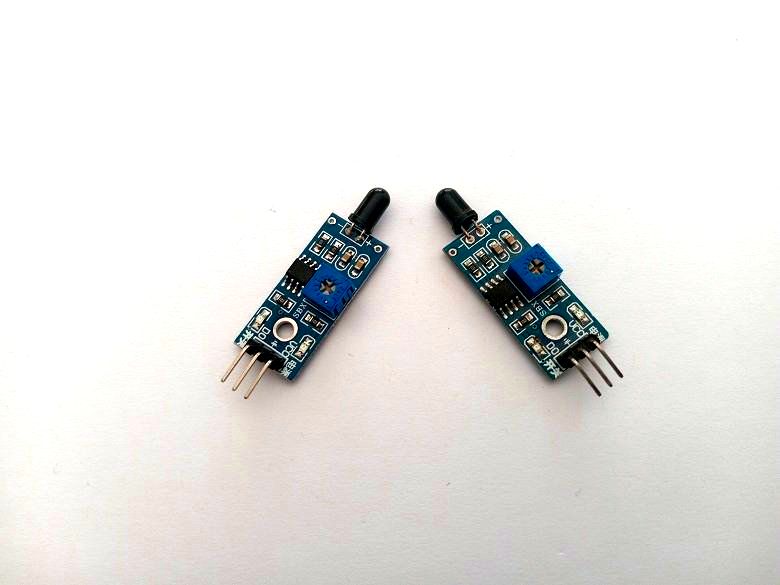
Le capteur de flamme KY-026 est un module capteur qui utilise une photorésistance pour détecter la lumière infrarouge émise par une flamme. Le module est généralement constitué d'un amplificateur opérationnel, d'un potentiomètre de réglage de sensibilité et d'une photorésistance.
Lorsqu'une flamme est détectée, la photorésistance détecte la lumière infrarouge émise par la flamme et génère une tension électrique qui est amplifiée par l'amplificateur opérationnel. La sensibilité du capteur peut être ajustée à l'aide du potentiomètre de réglage pour détecter des flammes à des distances différentes et pour minimiser les fausses détections.
Le module capteur de flamme KY-026 peut être utilisé dans une variété de projets, tels que des systèmes d'alarme incendie, des robots de lutte contre les incendies ou des systèmes de surveillance de feux de camp. Il peut être utilisé avec une variété de microcontrôleurs, tels que Arduino ou Raspberry Pi. Il suffit de connecter les broches d'alimentation et de données du module au microcontrôleur et de programmer le microcontrôleur pour réagir à la sortie du capteur en fonction des besoins du projet.
Les broches du capteur de flamme KY-026
Le module capteur de flamme KY-026 dispose de 3 broches, qui sont les suivantes :
- VCC : cette broche est utilisée pour alimenter le module en électricité. Elle doit être connectée à une source d'alimentation de 3,3 V à 5 V.
- GND(-) : cette broche est utilisée pour connecter le module à la masse du circuit.
- DO : cette broche est utilisée pour fournir la sortie du capteur. Elle fournit une tension de sortie de 0 V à la tension d'alimentation lorsqu'une flamme est détectée. La tension de sortie augmente avec l'intensité de la flamme détectée.

Les microcontrôleurs compatibles au capteur de flammes KY-026
Le capteur de flamme KY-026 peut être utilisé avec différents types de microcontrôleurs, tant qu'ils disposent d'une entrée analogique pour lire la tension de sortie du capteur. Certains des microcontrôleurs compatibles avec le capteur KY-026 sont :
- Arduino : Les cartes Arduino telles que l'Arduino Uno, Nano, Mega et Due disposent tous d'entrées analogiques pour lire la tension de sortie du capteur. Les broches de sortie analogique du capteur peuvent être connectées aux broches analogiques de l'Arduino, et le microcontrôleur peut être programmé pour réagir à la sortie du capteur en fonction des besoins du projet.
- Raspberry Pi : La Raspberry Pi dispose également d'entrées analogiques pour lire la tension de sortie du capteur, mais ces entrées ne sont pas disponibles directement sur la carte. Un convertisseur analogique-numérique (CAN) tel que le MCP3008 peut être utilisé pour lire la tension de sortie du capteur via les broches SPI du Raspberry Pi.
- ESP32 : L'ESP32 est un microcontrôleur Wi-Fi et Bluetooth qui dispose également d'entrées analogiques pour lire la tension de sortie du capteur. Les broches de sortie analogique du capteur peuvent être connectées aux broches analogiques de l'ESP32, et le microcontrôleur peut être programmé pour réagir à la sortie du capteur en fonction des besoins du projet.
Programmation du capteur de flamme KY-026
La programmation du capteur de flamme KY-026 dépend du microcontrôleur utilisé dans le projet. Cependant, voici les étapes de base pour lire les valeurs de sortie analogique du capteur et réagir en fonction de celles-ci :
- Initialisation : Tout d'abord, le microcontrôleur doit être configuré pour lire les valeurs analogiques du capteur de flamme. Cela peut être fait en configurant la broche d'entrée analogique appropriée comme entrée dans le code.
- Lecture de la valeur analogique : Ensuite, la tension de sortie du capteur de flamme peut être lue à partir de la broche d'entrée analogique configurée. Cette valeur est généralement comprise entre 0 et 5 volts, et est proportionnelle à l'intensité de la flamme détectée. Cette valeur analogique doit être convertie en une valeur numérique utilisable par le microcontrôleur.
- Traitement de la valeur : Après avoir lu la valeur analogique, le microcontrôleur peut effectuer un traitement sur cette valeur pour déterminer si une flamme est présente ou non. Par exemple, si la valeur analogique dépasse un certain seuil, le microcontrôleur peut déclencher une alarme ou une action spécifique.
- Répétition : La lecture de la valeur analogique doit être effectuée régulièrement pour détecter les changements de la flamme. Cela peut être réalisé à l'aide d'une boucle qui lit la valeur analogique à intervalles réguliers.
Voici un exemple de code Arduino qui lit la valeur analogique du capteur de flamme KY-026 et affiche la valeur sur le moniteur série :
|
|
void setup() { // Configure la broche A0 comme entrée analogique pinMode(A0, INPUT); // Démarre la communication avec le moniteur série Serial.begin(9600); } void loop() { // Lit la valeur analogique de la broche A0 int valeur_analogique = analogRead(A0); // Affiche la valeur lue sur le moniteur série Serial.print("Valeur analogique : "); Serial.println(valeur_analogique); // Attend 500 millisecondes avant de lire à nouveau la valeur delay(500); } |
Ce code lit la valeur analogique du capteur de flamme sur la broche A0 de l'Arduino, affiche cette valeur sur le moniteur série, puis attend 500 millisecondes avant de lire à nouveau la valeur. Le seuil de détection de la flamme peut être ajusté en modifiant la valeur de la variable valeur_analogique dans le code.
Utilisation du capteur de flamme KY-026 dans des projets robotiques
Le capteur de flamme KY-026 peut être utilisé dans des projets robotiques pour détecter la présence de flammes et réagir en conséquence. Voici quelques exemples d'utilisation du capteur de flamme dans des projets robotiques :
- Détection d'incendie : Le capteur de flamme peut être utilisé pour détecter les incendies et déclencher une alarme ou une action de sécurité. Par exemple, dans un projet de robot de sécurité incendie, le robot peut utiliser un capteur de flamme pour détecter les incendies dans une zone spécifique et alerter les services d'incendie.
- Contrôle de la flamme : Le capteur de flamme peut également être utilisé pour contrôler les flammes dans un projet de robotique. Par exemple, dans un projet de robot de soudure, le capteur de flamme peut être utilisé pour surveiller la flamme de soudure et ajuster la puissance de la source de chaleur en fonction de la distance entre la buse et la pièce à souder.
- Évitement de la flamme : Le capteur de flamme peut également être utilisé pour éviter les flammes dans un projet de robotique. Par exemple, dans un projet de robot de nettoyage de cuisine, le robot peut utiliser un capteur de flamme pour détecter les flammes des cuisinières et éviter les zones dangereuses.