Arduino UNO et le moteur pas à pas 28BYJ-48
Tutorial plan
1- Présenter le moteur pas à pas 28BYJ-48
2- Matériel nécessaire pour contrôler le moteur pas à pas 28BYJ-48 par Arduino UNO
3- Schéma de câblage du système
4- Programme Arduino
Présenter le moteur pas à pas 28BYJ-48
Le moteur pas à pas 28BYJ-48 est un petit moteur pas à pas unipolaire couramment utilisé dans les projets électroniques et de robotique en raison de son faible coût et de sa facilité de contrôle.
Caractéristiques principales :
Type : Moteur pas à pas unipolaire à 4 phases
Tension de fonctionnement : 5V ou 12V (selon le modèle)
Rapport de réduction : 64:1 (ce qui augmente la précision du mouvement)
Pas par tour (avant réduction) : 32 pas
Pas par tour (après réduction) : 2048 pas (pour un tour complet de l'axe)
Consommation de courant : Environ 240 mA par phase
Connecteur : 5 fils avec un connecteur compatible avec le pilote ULN2003
Utilisation :
Ce moteur est couramment utilisé dans :
Les imprimantes et scanners
Les systèmes d'automatisation et de robotique
Les projets DIY et Arduino (contrôle de mouvements précis)
Les systèmes de positionnement (ex: volets motorisés, bras robotiques)
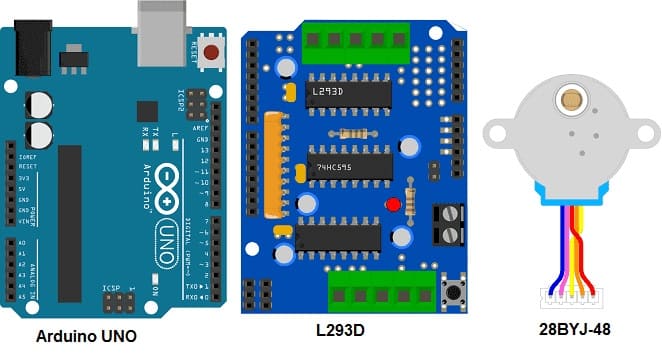
Matériel nécessaire pour contrôler le moteur pas à pas 28BYJ-48 par Arduino UNO
Carte Arduino UNO

La carte Arduino UNO est un microcontrôleur chargé d'envoyer les signaux de commande au moteur via le driver ULN2003.
Elle exécute le programme qui génère les séquences de commande pour faire tourner le moteur.
Module L293D (Double pont en H)
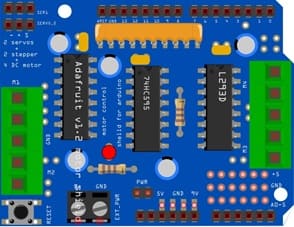
Le module Module L298N alimente et contrôle le moteur pas à pas en envoyant les bonnes séquences aux bobines.
Il accepte une alimentation de 4.5V à 36V pour le moteur.
Il permet l’inversion du sens de rotation et la régulation de vitesse via PWM.
Moteur pas à pas 28BYJ-48
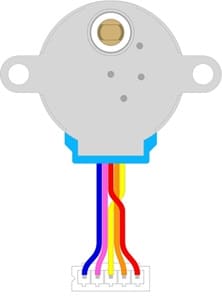
Le moteur pas à pas 28BYJ-48 convertit les impulsions électriques en mouvement rotatif précis.
Il Possède 4 phases, nécessitant un contrôleur ULN2003 pour être piloté par l’Arduino.
Câbles Dupont (Mâle-Femelle et Mâle-Mâle)

Pour connecter l’Arduino au module ULN2003 et alimenter le moteur.
Alimentation

Pour piloter le moteurs, on va utiliser une batterie de 9V.
Schéma de câblage du système
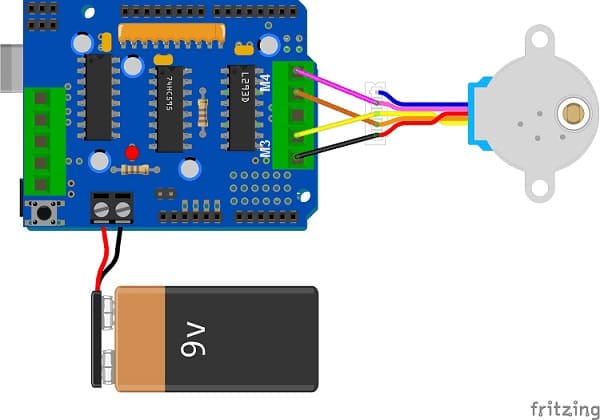
Pour réaliser le montage ci-dessus :
1- On connecte le module L293D à la carte Arduino UNO
2- On Connecte les broches de commande du moteur pas à pas 8BYJ-48 (pin 1, 2, 3 et 4) aux deux ports M3 et M4 du module L293D
Programme Arduino
Voici le programme Arduino qui permet de commander le moteur pas à pas 28BYJ-48 par la carte Arduino UNO et le module Shield L293D.
Il faut importer cette bibliothèque : AFMotor
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 |
#include <AFMotor.h> // Number of steps per output rotation // Change this as per your motor's specification const int stepsPerRevolution = 48; // connect motor to port #2 (M3 and M4) AF_Stepper motor(stepsPerRevolution, 2); void setup() { Serial.begin(9600); Serial.println("Stepper test!"); motor.setSpeed(255); // 10 rpm } void loop() { Serial.println("Single coil steps"); motor.step(100, FORWARD, SINGLE); /*motor.step(100, BACKWARD, SINGLE); Serial.println("Double coil steps"); motor.step(100, FORWARD, DOUBLE); motor.step(100, BACKWARD, DOUBLE); Serial.println("Interleave coil steps"); motor.step(100, FORWARD, INTERLEAVE); motor.step(100, BACKWARD, INTERLEAVE); Serial.println("Micrsostep steps"); motor.step(100, FORWARD, MICROSTEP); motor.step(100, BACKWARD, MICROSTEP); */ } |
0 commentaire
laisser un commentaire
Passion de robotique

Tutoriels récents





Atelier robotique

Tutoriels populaires





Construction des robots

Tutoriels plus commentés



Bras robotique

Categories
Maison intelligente