نظام متنقل لتتبع جسم متحرك يعتمد على بطاقة المايكروبيت و HC-SR04
محاور الدرس
مقدمة
1- كيف يعمل النظام المحمول لتتبع جسم متحرك بناءً على مستشعر بطاقة المايكروبيت و hc-sr04 ومحرك سيرفو
2- مكونات النظام لتتبع جسم متحرك الضرورية
3- مخطط الأسلاك النظام لتتبع جسم متحرك
4- برمجة بطاقة المايكروبيت مع Makecode للتحكم في النظام متنقل لتتبع جسم متحرك
مقدمة
نظام تتبع الأجسام المتحركة هو نظام يستخدم التقنيات الحديثة مثل تحديد المواقع العالمية والاتصالات اللاسلكية لتحديد موقع الأجسام المتحركة وتتبع حركتها بشكل دقيق وفعال. يمكن أن يتم استخدام هذا النظام في مجموعة متنوعة من التطبيقات، بما في ذلك تتبع السيارات، وإدارة flotillas، وتتبع الحمولات اللوجستية، وإدارة الأصول، والمراقبة الأمنية، والعديد من التطبيقات الأخرى.
المكونات الرئيسية لنظام تتبع الأجسام المتحركة:
1- الاتصالات اللاسلكية: تُستخدم لنقل بيانات الموقع من الأجهزة المتحركة إلى أنظمة الرصد والتحكم.
2- وحدة المعالجة المركزية (CPU) والبرمجيات: تحسن من قدرة النظام على تحليل البيانات، وتخزين المعلومات، وتقديم التقارير.
3- قاعدة بيانات: تخزن البيانات الجغرافية والمعلومات ذات الصلة بالأجسام المتحركة.
4- واجهة المستخدم: توفر واجهة بسيطة وسهلة الاستخدام للمستخدم لعرض معلومات الموقع والتحكم في النظام.
5- تكنولوجيا الحساب السحابي (Cloud Computing): تسمح بتخزين البيانات ومعالجتها على الأنترنت، مما يسمح بالوصول إلى المعلومات من أي مكان وفي أي وقت.
6- الأجهزة الإضافية: قد تشمل أجهزة إضافية مثل حساسات الحركة، وكاميرات المراقبة، وأجهزة الاستشعار البيئي لتوفير معلومات إضافية حول البيئة المحيطة بالأجسام المتحركة.
كيف يعمل النظام:
1- تحديد المواقع: تُرسل أجهزة إشارات لأجهزة الاستقبال لتحديد المواقع الجغرافية بدقة.
2- نقل البيانات: يُرسل البيانات الموقعية من أجهزة إلى قاعدة البيانات أو السحابة عبر الاتصالات اللاسلكية.
3- معالجة البيانات: يُعالج النظام البيانات الموقعية ويُحدث معلومات الموقع ومسار الجسم المتحرك.
4- عرض المعلومات: تقوم واجهة المستخدم بعرض الموقع الحالي للأجسام المتحركة وتوفير تقارير وتحليلات حول حركتها.
5- التحكم والتحليل: يُمكن للمشرفين استخدام النظام لتتبع الأجسام المتحركة، وتحليل سلوكها، واتخاذ القرارات بناءً على البيانات الموقعية.
بهذه الطريقة، يُمكن لنظام تتبع الأجسام المتحركة أن يوفر رؤية شاملة وفعالة حول حركة الأجسام المتحركة، مما يساعد في تحسين الإنتاجية والأمان واتخاذ القرارات الاستراتيجية.
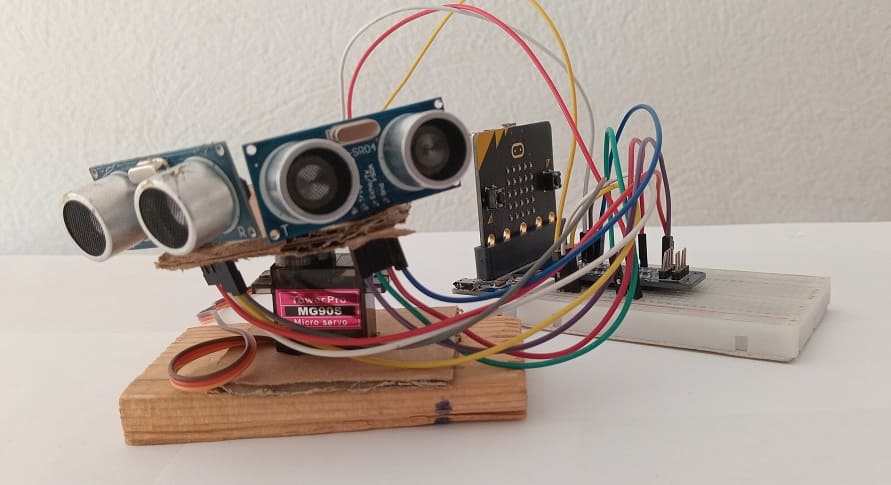
كيف يعمل النظام المحمول لتتبع جسم متحرك بناءً على اثنين من أجهزة الاستشعار بطاقة المايكروبيت و hc-sr04 ومحرك سيرفو
نظام التتبُع المحمول لجسم متحرك يعتمد على استخدام جهاز المايكروبيت (Micro:bit) مع جهازي استشعار HC-SR04 ومحرك سيرفو. هذا النظام يستخدم الاستشعار الفوق صوتي لقياس المسافات ومحرك السيرفو لتوجيه الجهاز نحو الجسم المتحرك. إليك كيف يعمل النظام بشكل عام:
1- استشعار المسافات باستخدام HC-SR04:
يقوم النظام بإرسال نبضة فوق صوتية باستخدام جهاز HC-SR04.
يتم قياس الوقت اللازم لعودة النبضة بواسطة دبوس الإشارة "Echo".
يُستخدم هذا الوقت لحساب المسافة من جهاز HC-SR04 إلى الجسم المتحرك.
2- توجيه محرك السيرفو:
عندما يتم قراءة المسافات من الاستشعارين، يُحسب الفرق بين المسافتين.
يتم استخدام هذا الفرق لحساب الزاوية التي يجب أن يتحرك إليها محرك السيرفو لتوجيه النظام نحو الجسم المتحرك.
يتم تحديث زاوية محرك السيرفو بناءً على هذا الحساب لتوجيه النظام بشكل صحيح.
3- برمجة جهاز المايكروبيت:
يتم استخدام لغة برمجة مثل Makecode في برمجة جهاز المايكروبيت.
يُكتب البرنامج لقراءة المسافات من HC-SR04 وحساب الزاوية المطلوبة لمحرك السيرفو.
يتم تحديث زاوية محرك السيرفو وفقًا للزاوية المحسوبة لتوجيه النظام نحو الجسم المتحرك.
4- التحكم في الحركة:
بعد تحديد الزاوية، يتم توجيه محرك السيرفو لتوجيه النظام نحو الجسم المتحرك.
يتم تكرار هذه العملية بشكل مستمر لتحديث توجيه النظام بما يتناسب مع حركة الجسم المتحرك.
باستخدام هذا النظام، يمكن للمايكروبيت وجهازي HC-SR04 ومحرك السيرفو العمل معًا لتتبع الجسم المتحرك وتوجيه النظام نحوه بشكل فعّال. يتطلب تطوير النظام فهمًا جيدًا للبرمجة والتحكم بالأجهزة الإلكترونية، وكذلك اختبارات دقيقة لضمان أداء موثوق به.
مكونات النظام لتتبع جسم متحرك الضرورية
1- لوحة المايكروبيت:
لوحة المايكروبيت هي لوحة إلكترونية تستخدم في تطوير الأجهزة الإلكترونية التفاعلية والمشاريع البرمجية. توفر المايكروبيت بيئة برمجية واجهة سهلة للمبتدئين والمحترفين لتطوير الأجهزة والمشاريع المختلفة.
2- بطاقة التوسيع لـلوحة المايكروبيت:

لتوسيع وظائف بطاقة المايكروبيت ، يمكنك استخدام بطاقة توسيع، المصممة خصيصًا لـ المايكروبيت. توفر لوحات التوسعة هذه موصلات إضافية ومكونات متكاملة ووظائف إضافية لتسهيل إضافة المستشعرات والمحركات والوحدات النمطية الإلكترونية الأخرى.
3- اثنين من أجهزة الاستشعار الموجات فوق الصوتية HC-SR04:

يتألف HC-SR04 عادةً من 4 أسلاك: VCC، Trig، Echo، وGND.
4- محرك سيرفو

محرك السيرفو هو جهاز كهربائي يستخدم لتوجيه أو تحديد الزاوية بدقة. يستخدم عادة في التطبيقات التي تتطلب تحكم دقيق في الحركة، مثل الروبوتات، ونماذج الطائرات اللاسلكية، ومشاريع الهواة، والروبوتات المتحكمة عن بعد، وأكثر من ذلك.
5- أسلاك التوصيل:

أسلاك توصيل لربط بين أقطاب HC-SR04 وبين بطاقة بطاقة المايكروبيت.
6- لوحة تجارب (Breadboard) :

لتسهيل توصيل المكونات والتجارب.
بعد توصيل المكونات، يمكنك استخدام Makecode كمثال سابق لقراءة بيانات المسافة من HC-SR04 وتوصيلها ببطاقة بطاقة المايكروبيت. يمكنك استخدام الشيفرة المصدرية التي قدمتها في الإجابة السابقة لتحقيق هذه المهمة.
مخطط الأسلاك النظام لتتبع جسم متحرك
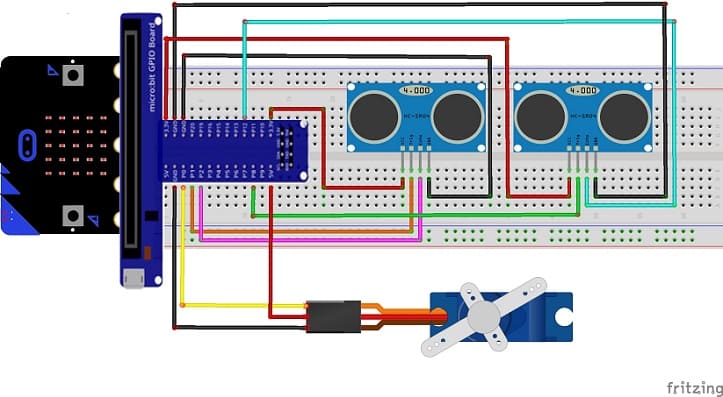
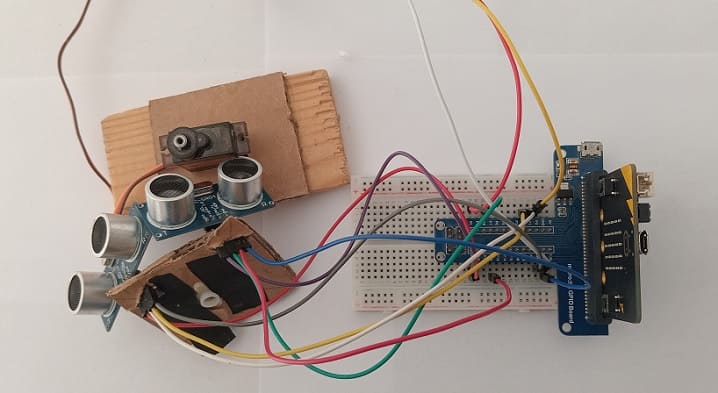
توصيل المستشعر الأول HC-SR04
قم بتوصيل طرف VCC الخاص بمستشعر HC-SR04 بمنفذ 3.3V الخاص ببطاقة المايكروبيت.
قم بتوصيل طرف GND الخاص بمستشعر HC-SR04 بمنفذ GND الخاص ببطاقة المايكروبيت.
قم بتوصيل طرف Echo الخاص بمستشعر HC-SR04 بمنفذ P8 الخاص ببطاقة المايكروبيت.
قم بتوصيل طرف Trig الخاص بمستشعر HC-SR04 بمنفذ P12 الخاص ببطاقة المايكروبيت.
توصيل المستشعر الثاني HC-SR04
قم بتوصيل طرف VCC الخاص بمستشعر HC-SR04 بمنفذ 3.3V الخاص ببطاقة المايكروبيت.
قم بتوصيل طرف GND الخاص بمستشعر HC-SR04 بمنفذ GND الخاص ببطاقة المايكروبيت.
قم بتوصيل طرف Echo الخاص بمستشعر HC-SR04 بمنفذ P1 الخاص ببطاقة المايكروبيت.
قم بتوصيل طرف Trig الخاص بمستشعر HC-SR04 بمنفذ P2 الخاص ببطاقة المايكروبيت.
توصيل محرك سيرفو
قم بتوصيل السلك الأحمر لمحرك سيرفو بدبوس 5 فولت لبطاقة التوسيع لـلوحة المايكروبيت.
قم بتوصيل السلك الأصفر من المحرك سيرفو بمنفذ GPIO22 الخاص بلوحة بطاقة المايكروبيت.
قم بتوصيل السلك البني من المحرك سيرفو بمنفذ GND الخاص بلوحة بطاقة المايكروبيت.
برمجة بطاقة المايكروبيت مع Makecode للتحكم في النظام متنقل لتتبع جسم متحرك
إليك برنامج بلغة البلوكس باستخدام MakeCode لتتبع جسم متحرك باستخدام اثنين من أجهزة الاستشعار HC-SR04 ومحرك سيرفو على بطاقة المايكروبيت:
1- قم بفتح محرر MakeCode على المتصفح الإلكتروني: https://makecode.microbit.org/.
2- انقر فوق لبدء مشروع جديد.
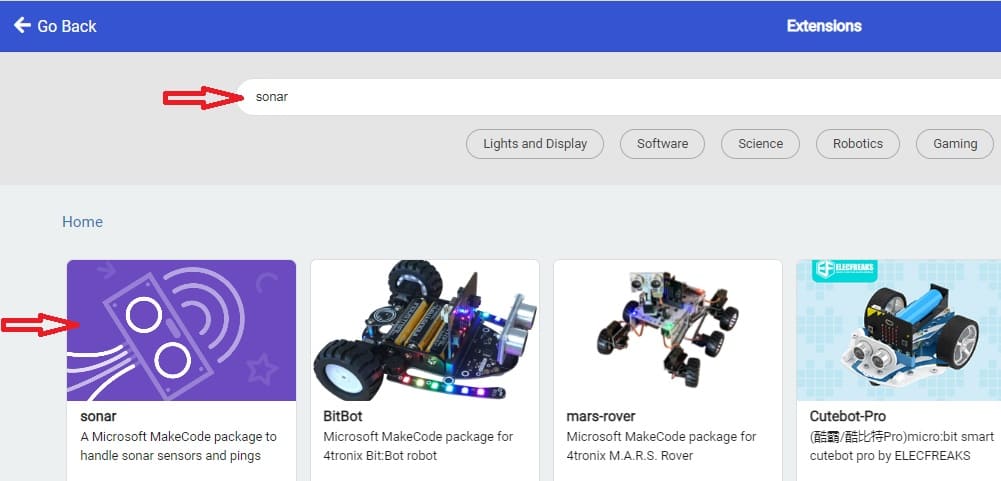
3- إضافة المكتبة HC-SR04:
اذهب إلى قسم "ملحقات" في MakeCode.

ابحث عن "sonar" وقم بإضافة مكتبة البلوتوث إلى مشروعك.
4- استخدم البلوكات التالية لبرمجة النظام:

هذا البرنامج يستخدم الاستشعارين لقياس المسافات، ثم يحدد الزاوية المناسبة لتوجيه المحرك السيرفو.
0 تعليق
اترك تعليقا
شغف بالروبوتات

الدروس الحديثة





ورشة الروبوتات

دروس الأكثر قراءة




صنع روبوتات

دروس الأكثر تعليق



ذراع آلية

Categories
المنزل الذكي