عصا التحكم

تعريف عصا التحكم
وحدة التحكم في عصا التحكم (أو ببساطة عصا التحكم) هي جهاز إدخال لألعاب الفيديو والمحاكاة. يتكون من رافعة (عصا) يمكن إمالتها في اتجاهات مختلفة للتحكم في الحركة في اللعبة ، بالإضافة إلى عدة أزرار لأداء حركات مختلفة.
يمكن توصيل عصا التحكم بجهاز كمبيوتر أو وحدة تحكم في الألعاب عبر منفذ USB أو كابل اتصال محدد. يمكن لبعض أذرع التحكم أيضًا الاتصال لاسلكيًا عبر البلوتوث أو أي تقنية لاسلكية أخرى.
تُستخدم عصي التحكم بشكل شائع في ألعاب المحاكاة ، مثل محاكاة الطيران والقيادة ، بالإضافة إلى ألعاب القتال والحركة. يتم تقديرها لدقتها وقدرتها على توفير التحكم الدقيق في الحركة في اللعبة.
عصا التحكم والميكروكونترولر
البًا ما تُستخدم المتحكمات الدقيقة مع أذرع التحكم في مشاريع الإلكترونيات للتحكم في الحركات أو الإجراءات بناءً على حركات ذراع التحكم.
لهذا ، من الضروري توصيل عصا التحكم بالمدخلات التناظرية أو الرقمية لوحدة التحكم الدقيقة باستخدام الأسلاك أو الموصلات المناسبة. يمكن بعد ذلك برمجة المتحكم الدقيق لقراءة القيم التناظرية أو الرقمية من عصا التحكم وإجراءات التحكم وفقًا لذلك.
في المشاريع الأكثر تقدمًا ، يمكن استخدام أذرع التحكم مع أجهزة استشعار ومشغلات أخرى لإنشاء أنظمة تحكم أكثر تعقيدًا. على سبيل المثال ، يمكن استخدام عصا التحكم للتحكم في ذراع آلية أو طائرة بدون طيار ، والجمع بين حركات ذراع التحكم وبيانات من أجهزة استشعار أخرى مثل الجيروسكوبات أو مستشعرات المسافة.
عصا التحكم واردوينو
مكن استخدام عصا التحكم مع لوحة أردوينو للتحكم في الحركات أو الإجراءات في مشروع إلكتروني. للقيام بذلك ، قم بتوصيل دبابيس الإخراج الخاصة بعصا التحكم بدبابيس الإدخال التناظرية أو الرقمية للوحة أردوينو باستخدام الأسلاك أو الموصلات المناسبة.
ثم يمكن قراءة القيم التناظرية أو الرقمية من عصا التحكم باستخدام وظيفة analogRead () أو digitalRead () في لوحة أردوينو ، اعتمادًا على نوع المسامير المستخدمة. بناءً على هذه القيم ، من الممكن التحكم في محركات المؤازرة أو محركات السائر أو المحركات الأخرى لأداء الحركات أو الإجراءات.
من الممكن أيضًا دمج عصا التحكم مع أجهزة الاستشعار والوحدات النمطية الأخرى لإنشاء مشاريع أكثر تقدمًا. على سبيل المثال ، يمكن استخدام عصا التحكم للتحكم في الروبوت ، والجمع بين حركات عصا التحكم والبيانات من أجهزة الاستشعار مثل مستشعرات المسافة أو مستشعرات تتبع الخط.
توجد أيضًا مكتبات خاصة بـ أردوينو تسهل استخدام عصي التحكم في مشاريع الإلكترونيات ، مثل مكتبة Joystick للوحة أردوينو. تساعد هذه المكتبات في تبسيط الكود وإضافة وظائف إضافية للتحكم في الحركات أو الإجراءات بناءً على مدخلات عصا التحكم.
دبابيس عصا التحكم
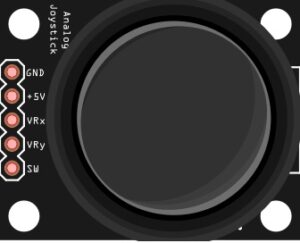
عادةً ما تحتوي أذرع التحكم على ثلاثة دبابيس: الطاقة والأرض والإشارة. عادة ما يتم تسمية الدبابيس على النحو التالي:
VCC أو + 5V: هذا الدبوس متصل بالإمداد الإيجابي (5 فولت) للنظام.
GND أو الأرضي: هذا الدبوس متصل بأرض النظام.
VRx و VRy: هذان هما الدبابيس للمحور X والمحور Y لعصا التحكم. إنها توفر إشارات خرج تناظرية تتناسب مع موضع عصا التحكم على طول كل محور. *
عادةً ما يكون دبوس SW (أو S) الخاص بعصا التحكم دبوس زر يُستخدم لاكتشاف وقت الضغط على زر عصا التحكم. عند الضغط على زر عصا التحكم ، يتم توصيل دبوس SW بالأرض ويمكن للمتحكم الدقيق اكتشاف ذلك على أنه انخفاض منطقي (أو "0") على دبوس الإدخال الرقمي المقابل.
عندما تقوم بتوصيل عصا التحكم بوحدة تحكم دقيقة ، مثل لوحة أردوينو ، فإنك تقوم عادةً بتوصيل دبابيس الطاقة والأرض بالمسامير المقابلة على وحدة التحكم الدقيقة ، وتوصيل دبابيس VRx و VRy باثنين من دبابيس الإدخال التناظرية الموجودة في وحدة التحكم الدقيقة. يمكن توصيل دبوس الزر ، إذا كان موجودًا ، بدبوس إدخال رقمي في وحدة التحكم الدقيقة.
برمجة عصا التحكم مع Arduino IDE
يمكن برمجة عصا التحكم باستخدام لغة البرمجة C++ وبرنامج Arduino IDE. فيما يلي مثال على كيفية برمجة عصا التحكم باستخدام برنامج Arduino IDE:
- توصيل عصا التحكم: قم بتوصيل عصا التحكم بلوحة Arduino وفقًا لتعليمات الدائرة الكهربائية الخاصة بالعصا التحكم.
- فتح برنامج Arduino IDE: قم بفتح برنامج Arduino IDE على جهاز الكمبيوتر الخاص بك وقم بإنشاء مشروع جديد.
- تعريف المتغيرات: ابدأ بتعريف المتغيرات اللازمة لقراءة القيم المستقبلة من عصا التحكم. على سبيل المثال ، يمكن تعريف متغيرات int لقيم محور X و Y ، ومتغير bool لحالة الزر.
- تهيئة المداخل: تهيئة مداخل Arduino المستخدمة لقراءة القيم من عصا التحكم. يمكن استخدام مداخل Analog إذا كانت القيم متغيرة أو مداخل رقمية إذا كانت القيم صفر أو واحد.
- قراءة القيم: استخدم الدالة analogRead أو digitalRead لقراءة القيم من المداخل المحددة. يجب تخزين القيم المقروءة في المتغيرات التي تم تعريفها في الخطوة 3.
- تحويل القيم: يجب تحويل القيم الرقمية المقروءة إلى قيم يمكن استخدامها للتحكم في الروبوت أو المشروع المستخدم. يمكن استخدام الدالة map () لتحويل القيم.
- التحكم في الروبوت أو المشروع: يمكن استخدام القيم التي تم تحويلها في الخطوة 6 للتحكم في الروبوت أو المشروع المستخدم.
- تحميل البرنامج: عند الانتهاء من البرمجة ، قم بتحميل البرنامج على لوحة Arduino.
في النهاية ، يتم تحميل البرنامج النه
دور عصا التحكم في التحكم في الروبوت
عصا التحكم هي واحدة من الأدوات الهامة التي تستخدم للتحكم في الروبوت. وظيفتها الرئيسية هي تحويل حركة اليد إلى إشارات يمكن استخدامها للتحكم في حركة الروبوت. عادة ما تتكون عصا التحكم من محاور مختلفة وزر للتحكم في حركة الروبوت. على سبيل المثال ، يتم استخدام عصا التحكم في التحكم في حركة الذراع الروبوتي أو الجسم الروبوتي ككل.
يتم استخدام حركة اليد على عصا التحكم لتحديد اتجاه حركة الروبوت. يتم ترميز حركة العصا إلى إشارات كهربائية تشير إلى اتجاه الحركة وسرعتها. يتم استخدام هذه الإشارات للتحكم في الحركة الخطية والدورانية للروبوت.
وبالإضافة إلى ذلك، يمكن توظيف الزر في عصا التحكم للتحكم في وظائف الروبوت الأخرى، مثل فتح وإغلاق الملقم أو تغيير وضع الروبوت بشكل عام.
وبالتالي، يلعب عصا التحكم دورًا حاسمًا في تحكم الإنسان في الروبوت وتنفيذ مهام محددة بطريقة دقيقة وفعالة.
0 تعليق
اترك تعليقا
شغف بالروبوتات

الدروس الحديثة





ورشة الروبوتات

دروس الأكثر قراءة




صنع روبوتات

دروس الأكثر تعليق



ذراع آلية

Categories
المنزل الذكي






