إنشاء نظام كشف العوائق على أساس مستشعر الموجات فوق الصوتية HC-SR04 و بطاقة الأردوينو
محاور الدرس
مقدمة
1- مبدأ تشغيل نظام الكشف عن العوائق على أساس HC-SR04 و الأردوينو
2- مكونات نظام الكشف عن العوائق
3- مخطط الأسلاك لنظام الكشف عن العوائق
4- برمجة لوحة الأردوينو المسؤولة على تشغيل نظام الكشف عن العوائق
مقدمة
نظام كشف العوائق يمكن أن يشير إلى نظام يستخدم مجموعة من الأجهزة والتقنيات لرصد وتحديد وجود عوائق في بيئة معينة. يمكن أن يكون هناك العديد من التطبيقات لنظم كشف العوائق، بما في ذلك في المركبات الذكية، الصناعة، الروبوتات، وأنظمة الأمان. سأقدم نظرة عامة على المكونات الرئيسية التي قد تشكل جزءًا من نظام كشف العوائق:
مستشعر المسافة: يستخدم لقياس المسافة بين الجهاز والعوائق. مثل HC-SR04 وهو مستشعر التردد الفوق الصوتي.
وحدة المعالجة المركزية (الميكروكنترولر): يتم استخدامه للتحكم في تشغيل وقراءة المستشعر واتخاذ قرارات استنادًا إلى البيانات.
مصدر طاقة: يمكن أن يكون بطارية أو مصدر طاقة خارجي، حسب المتطلبات.
مؤشرات بصرية (LEDs): يمكن استخدام LEDs لتوفير إشارات بصرية للمستخدم عند اكتشاف العوائق.
أجهزة صوتية (Buzzers): يمكن استخدام Buzzers لتوفير إشارات صوتية عند اكتشاف العوائق.
أنظمة اتصال: يمكن استخدام تقنيات الاتصال لتبادل البيانات بين مكونات النظام، مثل البلوتوث أو واي فاي.
برمجة وتحكم: يتم برمجة النظام لاتخاذ قرارات بناءً على البيانات التي يتم جمعها من المستشعر وتنفيذ الإجراءات المناسبة.
أنظمة تحكم ذكية: يمكن أيضًا استخدام تقنيات الذكاء الاصطناعي أو التعلم الآلي لتحسين أداء نظام كشف العوائق.
تعتمد تصميم نظام كشف العوائق على تطبيق محدد ومتطلباته الفريدة. يتم تكوين وبرمجة النظام بحيث يستجيب بفعالية للتحديد والتعامل مع العوائق في البيئة المحيطة به.
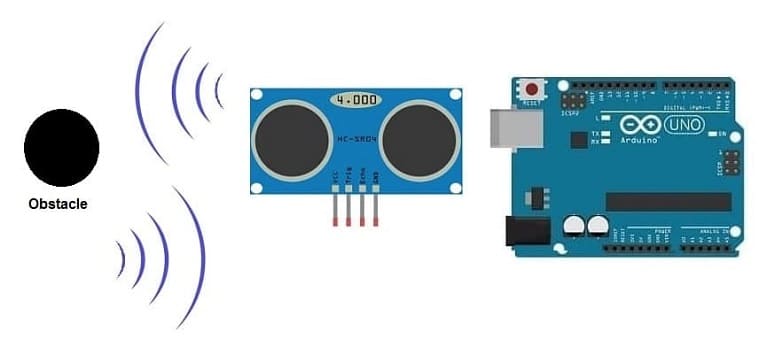
مبدأ تشغيل نظام الكشف عن العوائق على أساس HC-SR04 و الأردوينو
نظام الكشف عن العوائق الذي يعتمد على مستشعر HC-SR04 و الأردوينو مع الصمام و الجرس يعتمد على تقنية قياس المسافة بالموجات فوق الصوتية (الترددات الفوق صوتية) للكشف عن العوائق. إليك مبدأ تشغيل هذا النظام:
1- إرسال الموجات الفوق صوتية: يتم إرسال نبض فوق صوتي من قبل مستشعر HC-SR04 عند تفعيله عبر توجيه إشارة إلى دبوس التشغيل (Trig) باستخدام الأردوينو.
2- انعكاس الموجات على العائق: تتحرك الموجات الفوق صوتية عبر الهواء حتى تصطدم بعائق. عندما تصطدم بالعائق، تنعكس الموجات مرة أخرى نحو المستشعر.
3- استقبال التردد: يتم استقبال التردد المنعكس على دبوس الاستقبال (Echo) في المستشعر.
4- حساب المسافة: يقوم الأردوينو بقياس الفاصل الزمني بين إرسال إشارة التشغيل واستقبال التردد. باستخدام سرعة الصوت في الهواء (تقريباً 343 مترًا في الثانية عند 20 درجة مئوية)، يتم حساب المسافة إلى العائق.
5- كشف العائق: يقوم الأردوينو بمقارنة المسافة المحسوبة مع قيمة عتبة محددة مسبقًا. إذا كانت المسافة أقل من القيمة المعتمدة، يتم اعتبار وجود عائق.
6- تنشيط الـ الصمام والبازر: في حالة اكتشاف عائق، يقوم الأردوينو بتنشيط الـ الصمام واالجرس. الـ الصمام توفر إشارة بصرية، والبازر يصدر صوت تحذير.
7- مراقبة مستمرة: يقوم النظام بمتابعة المسافة بشكل مستمر، وإذا حرك العائق أو لم يعد موجودًا، يتم إلغاء تنشيط الـ الصمام والالجرس.
مكونات نظام الكشف عن العوائق
1- لوحة الاردوينو:
لوحة الأردوينو هي لوحة إلكترونية تستخدم في تطوير الأجهزة الإلكترونية التفاعلية والمشاريع البرمجية. توفر الأردوينو بيئة برمجية واجهة سهلة للمبتدئين والمحترفين لتطوير الأجهزة والمشاريع المختلفة.
2- حساس الموجات فوق الصوتية HC-SR04:

هو وحدة قياس المسافة بالترددات الفوق صوتية. يستخدم هذا الجهاز في العديد من التطبيقات لقياس المسافات بشكل دقيق وكشف العوائق
3- صمام ثنائي الباعث للضوء
![]()
الصمام ثنائي الباعث للضوء هو نوع من الأشباه الموصلات الذي ينبعث ضوء عند مرور التيار الكهربائي عبره.
4- مقاومة
![]()
يُفضل استخدام مقاومة لتحديد التيار الذي يمر في الصمام. يمكنك استخدام قيمة مقاومة تتوافق مع متطلبات الصمام وتوفر التيار المناسب لضمان إضاءة الصمام بشكل صحيح دون تلفه. القيمة الشائعة للمقاومة هي 220 أوم.
5- الجرس الإلكتروني

الجرس الإلكتروني هو جهاز إلكتروني يستخدم لإصدار صوت التنبيه أو الإنذار عند حدوث حدث معين أو عند تلقي إشارة معينة. يتم استخدام الجرس الإلكتروني في مجموعة متنوعة من التطبيقات، بما في ذلك الأنظمة الأمانية، وأجهزة التحكم، وأجهزة التنبيه.
6- أسلاك التوصيل:

أسلاك توصيل لربط بين أقطاب HC-SR04 وبين بطاقة الأردوينو.
7- لوحة تجارب (Breadboard) :

لتسهيل توصيل المكونات والتجارب.
مخطط الأسلاك لنظام الكشف عن العوائق
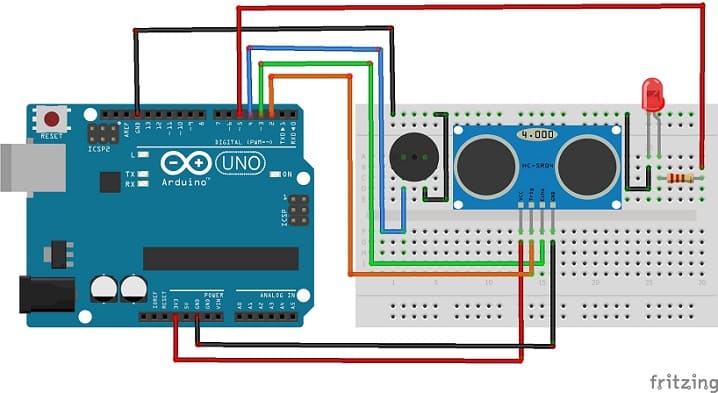
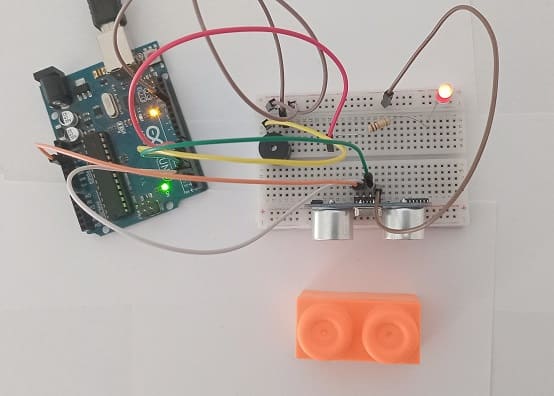
توصيل حساس HC-SR04 بلوحة الأردوينو:
قم بتوصيل طرف VCC الخاص بمستشعر HC-SR04 بمنفذ 3.3V الخاص بلوحة الأردوينو.
قم بتوصيل طرف GND الخاص بمستشعر HC-SR04 بمنفذ GND الخاص بلوحة الأردوينو.
قم بتوصيل طرف Echo الخاص بمستشعر HC-SR04 بمنفذ 3 الخاص بلوحة الأردوينو.
قم بتوصيل طرف Trig الخاص بمستشعر HC-SR04 بمنفذ 2 الخاص بلوحة الأردوينو.
توصيل صمام ثنائي الباعث للضوء بلوحة الأردوينو:
يتم توصيل المقاوم بين منفذ 5 والطرف الموجب (الأنود) من صمام ثنائي الباعث للضوء.
قم بتوصيل الطرف السالب (الكاثود) لكل صمام ثنائي الباعث للضوء بالأرض (GND) للوحة الأردوينو.
توصيل الجرس بلوحة الأردوينو:
قم بتوصيل الطرف (+) الخاص بالجرس بمنفذ 4 الخاص بلوحة الأردوينو.
قم بتوصيل الطرف (-) الخاص بالجرس بمنفذ GND الخاص بلوحة الأردوينو.
برمجة لوحة الأردوينو المسؤولة على تشغيل نظام الكشف عن العوائق
أولًا، تأكد قبل استخدام البرنامج من تحميل مكتبة Ultrasonic
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 |
#include "Ultrasonic.h" // إعداد مستشعر المسافة Ultrasonic ultrasonic(2, 3); // Trig et Echo int buzzer_pin = 4; int redled_pin = 5; void setup() { Serial.begin(9600); pinMode(buzzer_pin, OUTPUT); pinMode(redled_pin, OUTPUT); } void loop () { // قراءة المسافة من مستشعر المسافة int distance = ultrasonic.Ranging(CM); // عرض قيمة المسافة على الشاشة التسلسلية Serial.print("distance= "); Serial.print(distance); Serial.println(" cm"); // اكتشاف العوائق if (distance < 4) { // تشغيل الجرس digitalWrite(buzzer_pin, HIGH); // تشغيل صمام ثنائي الباعث للضوء digitalWrite(redled_pin, HIGH); } else { // إيقاف تشغيل الجرس digitalWrite(buzzer_pin, LOW); // إيقاف تشغيل صمام ثنائي الباعث للضوء digitalWrite(redled_pin, LOW); } delay(100); } |
هذا الكود يقوم بما يلي:
1- يقوم بتهيئة دبوس التشغيل والاستقبال والصمام والبازر على اللوحة.
2- يقوم بإرسال نبضة لتشغيل المستشعر وقياس المسافة المرتجعة.
3- يقوم بحساب المسافة استنادًا إلى الزمن المستغرق للإشارة المرتجعة.
4- يعرض قيمة المسافة على الشاشة التسلسلية.
5- يقوم بتشغيل الصمام والجرس إذا كانت المسافة أقل من 4 سم، وإيقاف تشغيلهما في غير ذلك.
0 تعليق
اترك تعليقا
شغف بالروبوتات

الدروس الحديثة





ورشة الروبوتات

دروس الأكثر قراءة




صنع روبوتات

دروس الأكثر تعليق



ذراع آلية

Categories
المنزل الذكي