The pushbutton
Defintion of the pushbutton
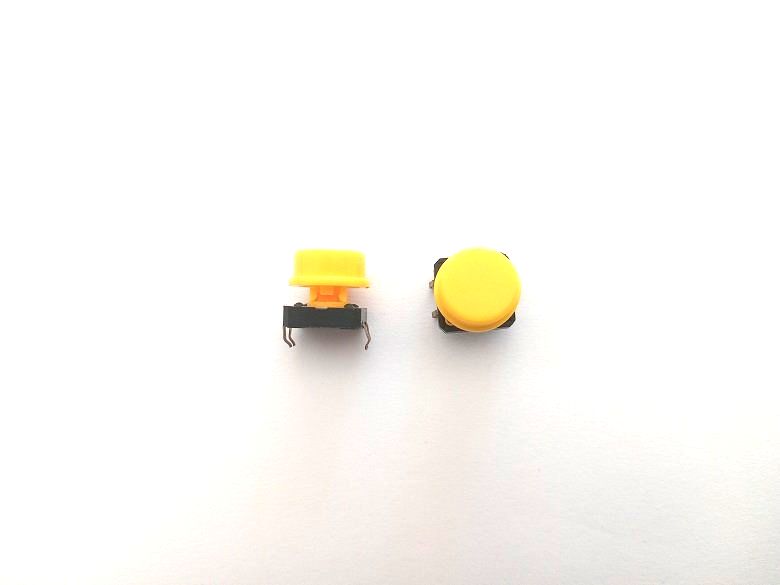
The pushbutton is a simple electronic component that can be very useful in various applications, including robotics projects. It can be used for various functions such as turning a robot on/off, selecting operating modes, modifying parameters, and so on.
By using microcontrollers, the pushbutton can be programmed to perform different actions depending on how it is pressed. For example, a single press may activate one function, a double press may change a mode, a long press may trigger another function, and so on.
The pushbutton can also be used to interact with the robot's user. For example, it can be used to prompt the user to press the button to start or stop the robot, or to confirm certain actions such as deleting data.
Use of the push button by microcontrollers
Microcontrollers can easily interface with pushbuttons to detect their states and perform specific actions based on those states.
Typically, pushbuttons are connected to a microcontroller's digital input pins, and the pins are configured as inputs with pull-up or pull-down resistors. When the button is pressed, it completes the circuit between the input pin and the ground, causing the input pin to read a low logic level. When the button is released, the pull-up or pull-down resistor brings the input pin back to a high logic level.
The microcontroller can then detect the state of the button by reading the digital input pin. Depending on the programming, the microcontroller can perform different actions based on the button's state, such as toggling an output pin, changing the state of a variable, or triggering a specific function.
In addition, some microcontrollers may have hardware debouncing capabilities that can help eliminate false button presses caused by electrical noise or mechanical bouncing. This can improve the reliability and accuracy of the pushbutton input.
Pushbutton programming
Pushbuttons are commonly used as input devices in microcontroller-based systems. The programming of a pushbutton involves configuring the microcontroller's GPIO pins to detect the state of the pushbutton, either pressed or released.
1- Here's an example of pushbutton programming using an Arduino microcontroller:
Define the pushbutton pin: Choose a GPIO pin on the microcontroller to connect to the pushbutton. For example, if the pushbutton is connected to pin 2, define it as follows:
|
1 |
const int pushButtonPin = 2; |
2- Configure the pushbutton pin as input: In the setup() function, configure the pushbutton pin as an input with pinMode():
|
1 2 3 |
void setup() { pinMode(pushButtonPin, INPUT); } |
3- Read the state of the pushbutton: In the loop() function, read the state of the pushbutton with digitalRead(). If the pushbutton is pressed, the function will return HIGH, otherwise it will return LOW.
|
1 2 3 4 5 6 7 8 |
void loop() { int buttonState = digitalRead(pushButtonPin); if (buttonState == HIGH) { // pushbutton is pressed } else { // pushbutton is not pressed } } |
4- Debouncing: Pushbuttons can generate noisy signals due to mechanical bouncing, so it's a good practice to debounce the signal before using it in your code. Debouncing can be achieved by adding a small delay after reading the button state or by using a software or hardware debouncing circuit.
Pushbuttons can be used in a variety of ways in robotic projects, such as controlling the movement of a robot, switching between modes of operation, or as a way for users to interact with the robot.
Role of the pushbutton in robotic projects
The push button is a simple yet important component in robotic projects. It can be used as an input device to trigger a specific action or function. For example, in a robotic arm project, the push button can be used to start or stop the arm's movement. In a mobile robot project, the push button can be used to switch on or off the robot's motor or change its direction.
Additionally, the push button can also be used as a mode selector, allowing the user to switch between different operating modes of the robot. For instance, a push button can be used to switch a robot from manual mode to autonomous mode.
0 comment
Leave a comment
Passion for robotics

Recent tutorials





Robotics workshop

Polpular tutorials





Making robots

Most commented tutorials




Robotic arm

Categories
Smart Home