The HC-SR04 sensor
Presentation of the HC-SR04 sensor
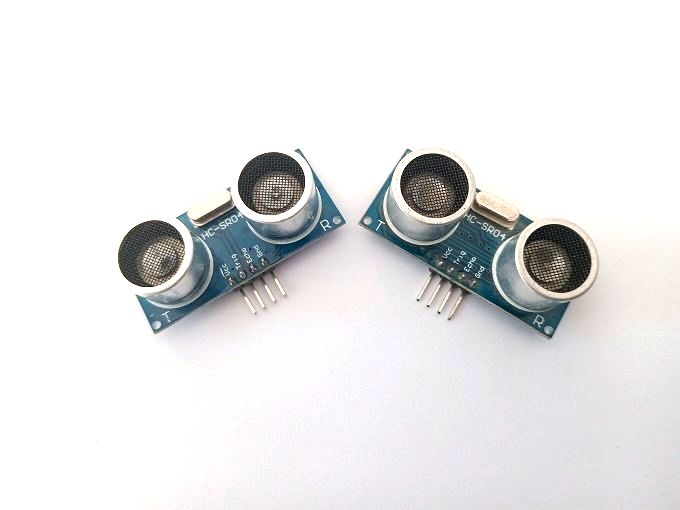
The HC-SR04 sensor is an ultrasonic distance sensor that can be used to measure the distance between the sensor and an object. It is commonly used in robotics, automation, and other applications that require precise distance measurements.
The HC-SR04 sensor works by sending out ultrasonic sound waves at a frequency of 40 kHz, which is beyond the range of human hearing. The sound waves bounce off of nearby objects and return to the sensor, where they are detected by a receiver. The time it takes for the sound waves to travel to the object and back is measured, and this information is used to calculate the distance between the sensor and the object.
The HC-SR04 sensor has two main components: an ultrasonic transmitter and an ultrasonic receiver. The transmitter sends out the ultrasonic sound waves, and the receiver detects the sound waves that bounce back. The sensor also includes a microcontroller, which controls the timing and processing of the sensor data.
The HC-SR04 sensor can be powered by a 5V power supply and can communicate with a microcontroller or other electronic device through digital input/output pins. It has a range of up to 4 meters and can provide distance measurements with an accuracy of up to 3mm.
In summary, the HC-SR04 sensor is an ultrasonic distance sensor that is widely used in robotics and other applications to provide accurate distance measurements. It works by sending out ultrasonic sound waves and measuring the time it takes for them to bounce back from nearby objects.
Composition of the HC-SR04 sensor
The HC-SR04 sensor is made up of several components. Here are the main components of the HC-SR04 sensor:
Ultrasonic Transmitter: It emits high-frequency sound waves (40kHz) that are used to measure distance.
Ultrasonic Receiver: It receives the sound waves reflected by objects in the environment.
Microcontroller: It controls the entire sensor, sending control signals to the transmitter and processing signals received by the receiver.
Oscillator: It provides a stable frequency source for the ultrasonic transmitter.
Timing circuit: It measures the time taken for the signal to go and come back, in order to calculate the distance between the sensor and the detected object.
Indicator LED: It lights up to indicate when the sensor is emitting sound waves.
Connection Pins: They allow the sensor to be connected to a microcontroller or electronic system.
The HC-SR04 sensor and robotics
The HC-SR04 sensor is commonly used in robotics as a distance sensor to detect the presence of objects and obstacles. It is particularly useful in mobile robots, which require accurate and reliable sensors to navigate their environment.
The HC-SR04 sensor can be used in a variety of robotic applications, such as obstacle detection and avoidance, wall following, and localization. For example, in an obstacle avoidance scenario, a robot equipped with HC-SR04 sensors can use the distance measurements to detect the presence of obstacles and adjust its path to avoid them.
In a wall-following scenario, a robot can use the HC-SR04 sensor to keep a certain distance from a wall as it moves along it. This can be useful in situations where the robot needs to follow a wall in a maze or a room.
The HC-SR04 sensor can also be used for localization in robotics. By using multiple sensors, a robot can calculate its position in a room or environment by triangulating the distance measurements. This can be useful in applications such as mapping and navigation.
Program the HC-SR04 sensor
To program the HC-SR04 sensor, you will need to connect it to a microcontroller or a development board, such as an Arduino. Here are the steps to program the HC-SR04 sensor:
1- Connect the HC-SR04 sensor to the microcontroller or development board. The HC-SR04 sensor has four pins: VCC, GND, Trig, and Echo. Connect VCC to 5V on the microcontroller, GND to ground, Trig to a digital output pin on the microcontroller, and Echo to a digital input pin on the microcontroller.
2- Write the code to read the distance measurements from the HC-SR04 sensor. You will need to send a pulse to the Trig pin, which will trigger the sensor to send out an ultrasonic pulse. The sensor will then send back a pulse to the Echo pin, which you can measure the duration of. This duration can be used to calculate the distance to the object using the formula: distance = duration * speed of sound / 2.
Here is an example code for the HC-SR04 sensor using Arduino:
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 |
#define trigPin 2 #define echoPin 3 long duration; int distance; void setup() { pinMode(trigPin, OUTPUT); pinMode(echoPin, INPUT); Serial.begin(9600); } void loop() { digitalWrite(trigPin, LOW); delayMicroseconds(2); digitalWrite(trigPin, HIGH); delayMicroseconds(10); digitalWrite(trigPin, LOW); duration = pulseIn(echoPin, HIGH); distance = duration * 0.034 / 2; Serial.print("Distance: "); Serial.print(distance); Serial.println(" cm"); delay(500); } |
This code sends a pulse to the Trig pin, waits for the sensor to send back a pulse to the Echo pin, and calculates the distance based on the duration of the pulse. The distance is then printed to the serial monitor.
3- Upload the code to the microcontroller or development board and test the HC-SR04 sensor. You can place an object in front of the sensor and see if the distance measurements are accurate.
0 comment
Leave a comment
Passion for robotics

Recent tutorials





Robotics workshop

Polpular tutorials





Making robots

Most commented tutorials





Robotic arm

Categories
Smart Home





