Mobile system for tracking a moving object based on Arduino and HC-SR04
Tutorial plan
Introduction
1- How does the mobile system for tracking a moving object work ?
2- Necessary system components
3- System Wiring Diagram
4- Program the Arduino UNO with to control the system
Introduction
A mobile system for tracking a moving object is a technological solution that utilizes mobile devices such as smartphones or tablets equipped with GPS (Global Positioning System) capabilities to monitor and record the real-time location of an object as it moves. This system typically consists of a mobile application installed on the tracking device, which continuously collects location data through GPS sensors. The collected data is then transmitted to a central server or cloud-based platform for processing, storage, and analysis.
Key components of a mobile tracking system include:
Mobile Application: A software application installed on a mobile device that collects location data using GPS sensors and facilitates communication with the server backend.
GPS Technology: Utilizes GPS technology embedded within the mobile device to determine its precise geographical location.
Server Backend: A centralized server infrastructure responsible for receiving, processing, and storing location data collected from multiple mobile devices. The server backend often includes databases for data storage, APIs for communication with mobile applications, and algorithms for data analysis.
Communication Protocol: Defines the method of communication between the mobile application and the server backend, ensuring secure and efficient data transmission.
Data Storage and Management: Involves the storage and management of location data collected from various mobile devices, typically in a database or cloud-based storage solution.
Visualization and Reporting: Provides tools for visualizing the tracked object's movements on maps, generating reports, and setting up alerts for specific events (e.g., entering or leaving predefined areas).
User Interface: Offers an intuitive interface for users to interact with the tracking system, view real-time and historical location data, and configure tracking settings.
A mobile tracking system can be used for various purposes, including fleet management, asset tracking, personal safety, logistics, and location-based services. It enables businesses and individuals to monitor the whereabouts of valuable assets, vehicles, or people in real-time, leading to improved efficiency, security, and decision-making.
How does the mobile system for tracking a moving object work ?
The system you're describing sounds like a basic setup for object tracking using ultrasonic sensors and a servo motor, commonly used in hobbyist projects and robotics. Here's a general overview of how such a system might work:
1- Hardware Setup:
Arduino board: This serves as the main control unit for the system. It will read sensor data and control the servo motor.
HC-SR04 Ultrasonic Sensors (2): These sensors emit ultrasonic waves and measure the time taken for the waves to bounce back after hitting an object. By calculating the time difference, you can determine the distance of the object.
Servo Motor: This motor will be used to rotate the ultrasonic sensors to scan the surrounding area.
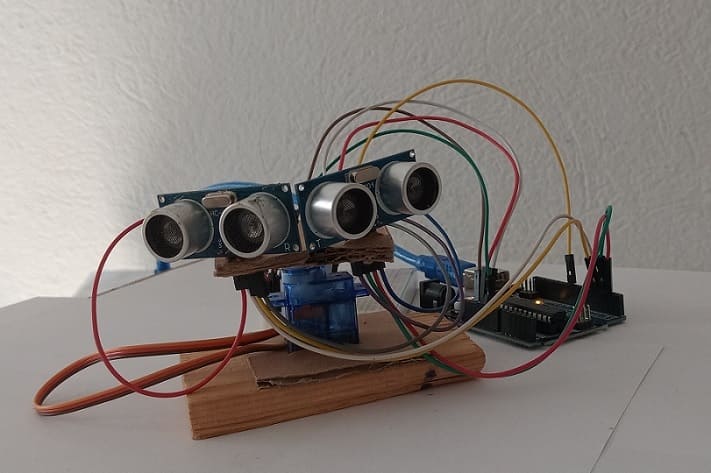
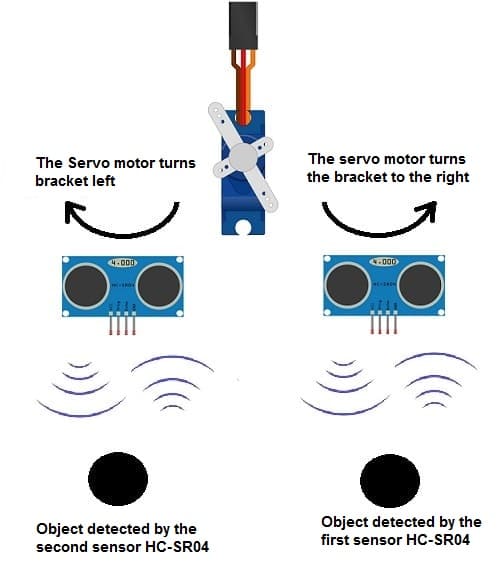
2- Mounting the Sensors and Motor:
The two ultrasonic sensors are usually mounted at some distance apart on a platform. This arrangement allows the system to determine the direction of the object.
The servo motor is mounted in a way that it can rotate the platform where the sensors are mounted. This rotation allows the system to scan the area.
3- Coding:
The Arduino code will involve initializing the ultrasonic sensors and servo motor.
The servo motor will rotate the platform in steps and at each step, the Arduino will trigger the ultrasonic sensors to take distance measurements.
Based on the distance measurements from the sensors, the Arduino can determine the direction of the object and adjust the servo motor to keep the object within a certain range or angle of detection.
4- Object Tracking:
By continuously scanning the area using the servo motor and taking distance measurements with the ultrasonic sensors, the Arduino can track the movement of objects.
The Arduino can implement logic to determine how to adjust the servo motor based on the movement of the object. For example, if the object moves to the right, the system might adjust the servo motor to turn the sensors to the right to keep the object within the field of view.
Necessary system components
Arduino UNO Board

The Arduino Uno board is a microcontroller board based on the ATmega328P microcontroller. It's one of the most popular and widely used boards in the Arduino family due to its simplicity and versatility.
It is the central control unit for your project.
Two HC-SR04 ultrasonic Sensors

The HC-SR04 ultrasonic sensor is a popular and inexpensive component commonly used in robotics, IoT projects, and various other applications where distance measurement is needed.
Servo motor:

A servo motor is a rotary actuator that allows for precise control of angular position. It consists of a motor, a set of gears, a control circuit, and a feedback system. Servo motors are widely used in various applications such as robotics, RC (remote-controlled) vehicles, industrial automation, and more.
Jumper Wires:

For making temporary connections and wiring between components.
Breadboard:
A breadboard is a useful tool for creating temporary electronic circuits. It allows you to connect components without soldering.
System Wiring Diagram
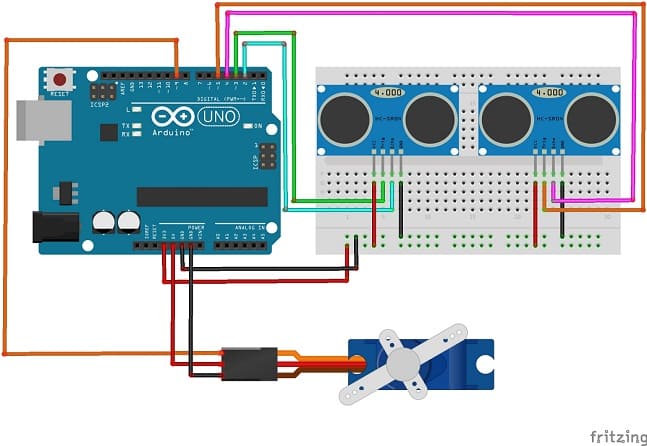
Attaching the first HC-SR04 sensor :
- Connect the VCC(+) pin of the HC-SR04 ultrasonic sensor to the 3.3V pin on the Arduino.
- Connect the Trig pin of the HC-SR04 ultrasonic sensor to pin 3 on the Arduino.
- Connect the Echo pin of the HC-SR04 ultrasonic sensor to pin 2 on the Arduino.
- Connect the GND(-) pin of the DHT22 sensor to any ground (GND) pin on the Arduino.
Attaching the second HC-SR04 sensor :
- Connect the VCC(+) pin of the HC-SR04 ultrasonic sensor to the 3.3V pin on the Arduino.
- Connect the Trig pin of the HC-SR04 ultrasonic sensor to pin 5 on the Arduino.
- Connect the Echo pin of the HC-SR04 ultrasonic sensor to pin 4 on the Arduino.
- Connect the GND(-) pin of the HC-SR04 sensor to any ground (GND) pin on the Arduino.
Attaching the servo motor :
- Connect the red wire from the servo to pin 9 of the Arduino.
- Connect the yellow wire from the servo to the GPIO22 pin of the Arduino.
- Connect the brown wire from the servo to the GND pin of the Arduino.
Program the Arduino to control the system
To program the system, you'll need to follow these steps.
1- import this library :Ultrasonic for HC-SR04 sensor
2- Create a new Arduino script and write the following code :
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 |
#include <Ultrasonic.h> #include <Servo.h> Ultrasonic ultrasonic_1(3, 2); // Trig et Echo Ultrasonic ultrasonic_2(5, 4); // Trig et Echo Servo myservo; // create servo object to control a servo // twelve servo objects can be created on most boards // variable to store the servo position int pos_init = 90; void setup() { // attaches the servo on pin 9 to the servo object myservo.attach(9); myservo.write(90); } void loop() { // Measure distances from both sensors int distance1 = ultrasonic_1.Ranging(CM); int distance2 = ultrasonic_2.Ranging(CM); if ((distance1 < 4)&&(pos_init<=170)) { // If the first HC-SR04 sensor detects an object // goes from pos_init degrees to pos_init+10 // The servo motor turns the bracket to right for (int pos = pos_init; pos <= pos_init+10; pos += 1) { // in steps of 1 degree myservo.write(pos); // tell servo to go to position in variable 'pos' delay(20); // waits 15ms for the servo to reach the position } pos_init=pos_init+10; } // The servo motor turns the bracket to left if ((distance2 < 4)&&(pos_init>=10)) { // If the second HC-SR04 sensor detects an object // goes from pos_init degrees to pos_init-10 degrees for (int pos = pos_init; pos >= pos_init-10; pos -= 1) { myservo.write(pos); // tell servo to go to position in variable 'pos' delay(20); // waits 15ms for the servo to reach the position } pos_init=pos_init-10; } delay(500); } |
Explanation:
1- The program initializes the servo motor and the ultrasonic sensors in the setup() function.
2- In the loop() function, the servo motor is rotated to the starting position (90 degrees).
3- Distance measurements are taken from both ultrasonic sensors by triggering them and measuring the time it takes for the sound waves to return.
4- The distance readings from sensor 1 are mapped to servo angles. This assumes that the object is moving in a straight line in front of the sensors.
5- The servo motor position is adjusted based on the calculated object position.
6- There's a delay between iterations to control the update rate of the servo motor.
0 comment
Leave a comment
Passion for robotics

Recent tutorials





Robotics workshop

Polpular tutorials





Making robots

Most commented tutorials



Robotic arm

Categories
Smart Home