Piloter deux LEDs par la carte ESP32
Plan du tutoriel
1- Quel est le rôle des LEDs dans les projets robotiques ?
2- Les composants nécessaires pour contrôler deux LEDs par la carte ESP32
3- Montage de la carte ESP32 avec deux LEDs
4- Allumer deux LEDs par la carte ESP32
5- Clignoter deux LEDs par la carte ESP32
Quel est le rôle des LEDs dans les projets robotiques ?
Les LEDs (diodes électroluminescentes) jouent plusieurs rôles importants dans les projets robotiques. Voici quelques-uns des rôles courants des LEDs dans les projets robotiques :
Indication de l'état : Les LEDs sont souvent utilisées pour indiquer l'état d'un robot ou d'un système. Par exemple, une LED peut être utilisée pour indiquer si le robot est allumé ou éteint, s'il est en mode veille ou en fonctionnement actif, ou s'il rencontre une erreur ou un dysfonctionnement.
Signaux de communication : Les LEDs peuvent être utilisées pour établir une communication visuelle entre le robot et les utilisateurs ou d'autres systèmes. Par exemple, différentes couleurs de LEDs peuvent être utilisées pour indiquer différents types de messages ou d'états, tels que le passage en mode autonome, la réception d'une commande ou la transmission de données.
Éclairage : Les LEDs sont couramment utilisées pour fournir un éclairage dans les projets robotiques. Elles peuvent être utilisées pour éclairer l'environnement du robot, améliorer la visibilité des capteurs ou des caméras, ou créer des effets d'éclairage pour des raisons esthétiques ou fonctionnelles.
Détection des événements : Les LEDs peuvent être utilisées comme des capteurs de lumière pour détecter certains événements ou conditions. Par exemple, les variations de luminosité peuvent être détectées par une LED pour suivre les changements d'environnement ou pour activer des actions spécifiques du robot en réponse à ces variations.
Feedback utilisateur : Les LEDs peuvent être utilisées pour fournir un feedback visuel aux utilisateurs lorsqu'ils interagissent avec le robot. Par exemple, une LED peut s'allumer ou clignoter pour confirmer qu'une action a été effectuée ou pour signaler une erreur.
En résumé, les LEDs sont des composants polyvalents utilisés dans les projets robotiques pour l'indication visuelle, la communication, l'éclairage, la détection des événements et le feedback utilisateur. Leur faible consommation d'énergie, leur petite taille et leur disponibilité dans différentes couleurs en font un choix populaire dans de nombreux projets robotiques.
Les composants nécessaires pour contrôler deux LEDs par la carte ESP32
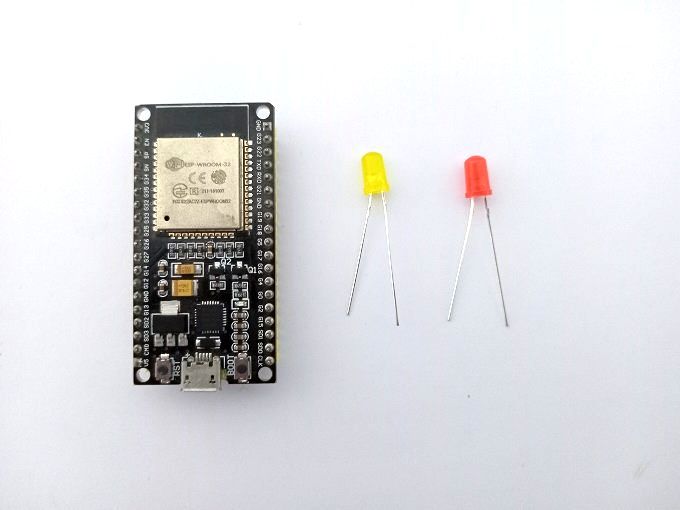
Pour contrôler deux LEDs à l'aide de la carte ESP32, voici les composants nécessaires :
ESP32 : La carte de développement ESP32, qui est une carte basée sur un microcontrôleur WiFi et Bluetooth intégré, capable de contrôler les LEDs et de communiquer avec d'autres périphériques. 
Deux LEDs : Vous aurez besoin de deux LEDs de votre choix. Assurez-vous de choisir les LEDs avec les caractéristiques appropriées, telles que la couleur, la tension directe et le courant nominal. 
Deux résistances : Vous aurez besoin d'une résistance pour chaque LED afin de limiter le courant qui les traverse et de les protéger. La valeur de la résistance dépendra de la tension d'alimentation et des caractéristiques de la LED. Une résistance typique de 220 ohms conviendrait généralement. 
Câbles de connexion : Vous aurez besoin de câbles pour connecter les LEDs, les résistances et l'ESP32. Vous pouvez utiliser des fils de raccordement mâle-femelle pour cela.
Breadboard (Plaque d'essai) : Une breadboard est utile pour créer un circuit temporaire et connecter facilement les composants entre eux. 
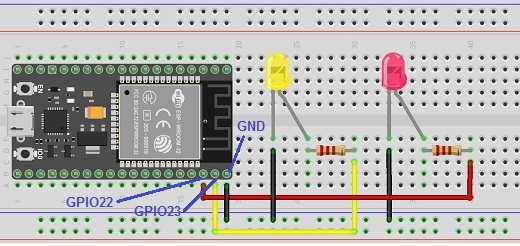
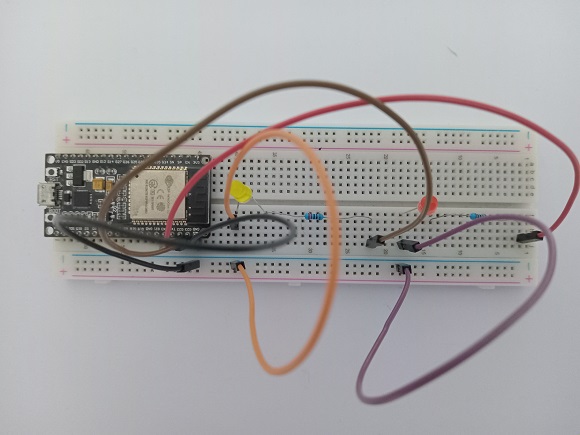
Montage de la carte ESP32 avec deux LEDs
Connectez le GPIO23 de l'ESP32 à une extrémité de la résistance R1.
Connectez l'autre extrémité de R1 à l'anode (patte plus longue) de LED jaune.
Connectez la cathode (patte plus courte) de LED jaune à la masse (GND) de l'ESP32.
Répétez les mêmes connexions pour GPIO22, R2 et LED rouge.
Allumer deux LEDs par la carte ESP32
Pour allumer deux LEDs à l'aide de la carte ESP32 avec MicroPython, utilisez un éditeur de texte pour écrire le code MicroPython suivant et enregistrez-le dans un fichier avec l'extension ".py" (par exemple, "leds.py") :
|
1 2 3 4 5 6 7 8 9 |
import machine import time # Déclaration des broches GPIO pour les LEDs jaune et rouge led_pin1 = machine.Pin(1, machine.Pin.OUT) led_pin2 = machine.Pin(2, machine.Pin.OUT) allumer les deux LEDs led_pin1.value(1) led_pin2.value(1) |
Le code ci-dessus allume les deux LEDs jaune et rouge.
Clignoter deux LEDs par la carte ESP32
Pour faire clignoter deux LEDs à l'aide de la carte ESP32 avec MicroPython, utilisez un éditeur de texte pour écrire le code MicroPython suivant et enregistrez-le dans un fichier avec l'extension ".py" (par exemple, "clignoter_leds.py") :
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 |
import machine import time # Declaration of GPIO pins for yellow and red LEDs led_pin1 = machine.Pin(23, machine.Pin.OUT) led_pin2 = machine.Pin(22, machine.Pin.OUT) # Boucle principale while True: led_pin1.value(1) # allumer LED jaune led_pin2.value(0) # éteindre LED rouge time.sleep(2) # Attendre 2 secondes led_pin1.value(0)# éteindre LED jaune led_pin2.value(1)# allumer LED rouge time.sleep(2) # Attendre 2 secondes |
Le code allument et éteignent les deux LEDs alternativement. Dans la boucle principale, les deux LEDs clignotent alternativement avec un intervalle de 2 secondes.
Lorsque vous exécutez le programme sur l'ESP32, les deux LEDs devraient commencer à clignoter selon le schéma défini.
0 commentaire
laisser un commentaire
Passion de robotique

Tutoriels récents




Atelier robotique

Tutoriels populaires





Construction des robots

Tutoriels plus commentés




Bras robotique

Categories
Maison intelligente