La carte Micro:bit et le moteur pas à pas 28BYJ-48
Tutorial plan
1- Définition du moteur pas à pas 28BYJ-48
2- Comment la carte Micro:bit commande le moteur pas à pas 28BYJ-48 ?
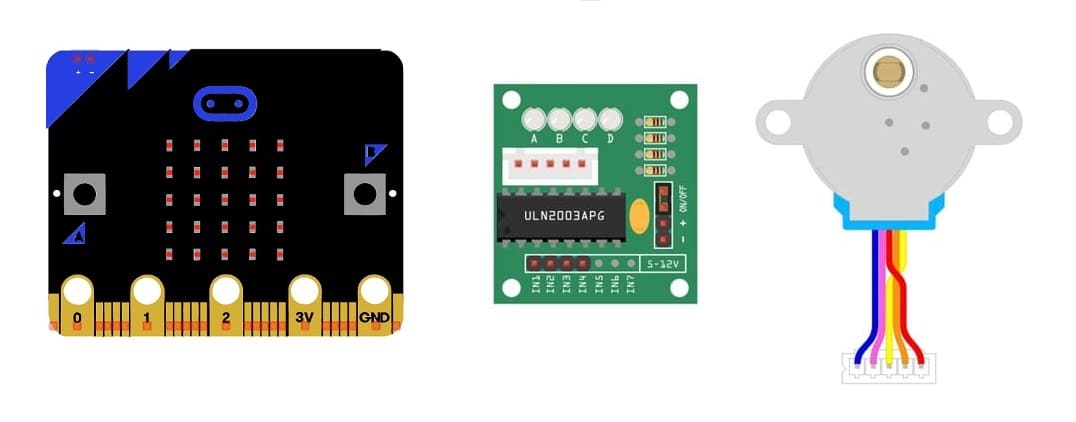
3- Matériel nécessaire
4- Schéma de câblage du système
5- Programmation de la carte Micro:bit avec Makecode
Définition du moteur pas à pas 28BYJ-48
Le moteur 28BYJ-48 est un moteur pas à pas unipolaire très utilisé dans les projets électroniques et de robotique en raison de son faible coût, de sa simplicité d'utilisation et de sa compatibilité avec divers microcontrôleurs. Il est idéal pour des applications nécessitant un contrôle précis du mouvement, comme les bras robotiques, les imprimantes 3D, ou les mécanismes de rotation.
Le moteur 28BYJ-48 est souvent fourni avec un contrôleur ULN2003, un circuit intégré qui simplifie la commande des bobines du moteur à partir d'un microcontrôleur comme la carte Micro:bit.
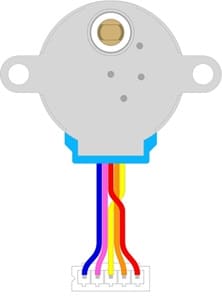
Broches du moteur :
Rouge : Alimentation commune (Vcc).
Bleu, Rose, Jaune, Orange : Bobines du moteur.
ULN2003 :
Entrées : Connectées au microcontrôleur (via des broches numériques).
Sorties : Connectées aux bobines du moteur.
Alimentation : Fourni en 5 V ou 12 V.
Avantages
1. Facilité de contrôle : Peut être contrôlé en utilisant des bibliothèques standards comme celles d'Arduino.
2. Précision : Grâce à la boîte de réduction, il permet des mouvements très précis.
3. Coût : Très abordable, souvent utilisé pour des projets éducatifs et de prototypage.
4. Couple : Suffisant pour de petites charges.
Comment la carte Micro:bit commande le moteur pas à pas 28BYJ-48 ?
Pour commander un moteur pas à pas 28BYJ-48 à l'aide d'une carte Micro:bit, il est nécessaire de comprendre comment la Micro:bit peut gérer les signaux pour activer les bobines du moteur. Généralement, cela se fait à l'aide d'un module de contrôle comme l'ULN2003, qui agit comme une interface entre la Micro:bit et le moteur.
Un moteur pas à pas fonctionne en activant ses bobines dans un ordre précis. Cela permet au moteur de "faire un pas" pour chaque activation. Le moteur 28BYJ-48 possède 4 bobines, activées séquentiellement pour produire une rotation fluide.
La Micro:bit envoie des signaux numériques (HIGH ou LOW) sur ses broches GPIO pour activer ou désactiver les bobines via le module ULN2003. Chaque bobine reçoit son signal à partir de la Micro:bit, en respectant un schéma précis de séquence.
Matériel nécessaire
Carte Micro:bit
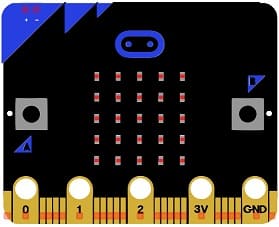
La Micro:bit est une carte programmable qui agit comme le cerveau du système. Elle génère des signaux numériques pour commander le module ULN2003.
Elle Fournit des signaux de contrôle via ses broches GPIO pour activer les bobines du moteur pas à pas et programme la séquence des impulsions nécessaires pour faire avancer ou reculer le moteur.
Module pilote ULN2003
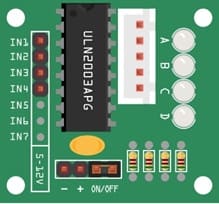
Le ULN2003 est un module de contrôle conçu pour piloter des charges inductives comme les moteurs pas à pas. Il contient un ensemble de transistors Darlington capables de gérer le courant nécessaire pour activer les bobines du moteur.
Moteur pas à pas 28BYJ-48
Le 28BYJ-48 est un moteur pas à pas à 4 phases avec une boîte de réduction (rapport 1:64) pour améliorer le couple.
Il convertit les impulsions électriques en mouvements mécaniques précis et réalise des mouvements angulaires avec une haute résolution (2048 pas par tour).
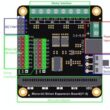
Carte GPIO pour Micro:bit

Une carte GPIO (comme un breakout board) simplifie la connexion entre la Micro:bit et le module ULN2003. Elle rend accessible les broches GPIO de la Micro:bit pour les relier à des périphériques.
Batterie de 9V

La batterie de 9V fournit l'énergie nécessaire pour alimenter le module ULN2003 et le moteur pas à pas.
Câbles de connexion

Des câbles (mâle-mâle, femelle-femelle ou mâle-femelle) pour connecter :
La carte Micro:bit au module ULN2003.
L'ULN2003 au moteur 28BYJ-48.
Plaque d'essai (Breadboard) :

On utilise la plaque d'essai pour faciliter le câblage des différents composants.
Schéma de câblage du système
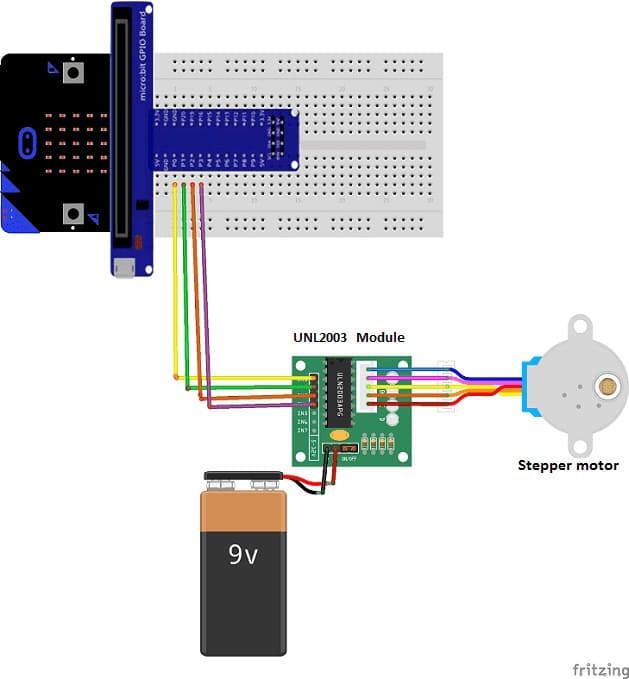
1- Carte GPIO
Insérez la Micro:bit dans la carte GPIO pour faciliter les connexions vers le module ULN2003.
2- Micro:bit à ULN2003 :
P0 → IN1
P1 → IN2
P2 → IN3
P3 → IN4
GND de la Micro:bit → GND du module ULN2003.
3- ULN2003 à moteur 28BYJ-48 :
Connectez les fils du moteur (rouge, bleu, rose, jaune, orange) au port dédié du module ULN2003.
4- Batterie à ULN2003 :
Le fil positif de la batterie (9V) → VCC du module ULN2003.
Le fil négatif de la batterie → GND commun.
Programmation de la carte Micro:bit avec Makecode
Suivez ces étapes pour ajouter le code nécessaire :
1- Ouvrez l'éditeur MakeCode pour Micro:bit sur le site https://makecode.microbit.org/.
2- Créez un nouveau projet.
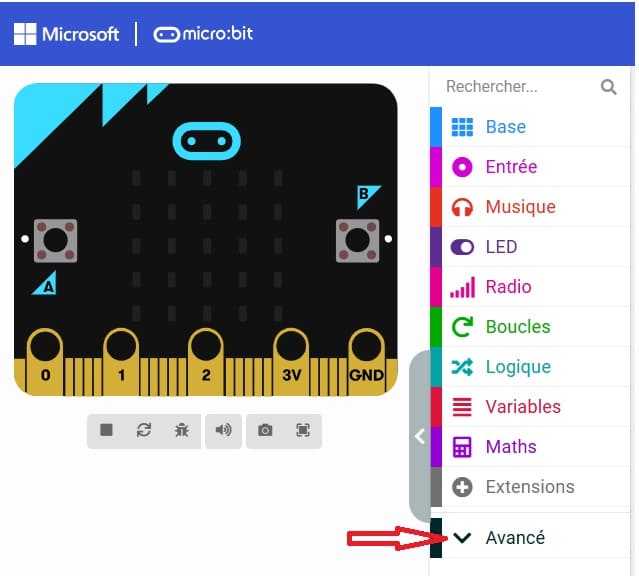
3- Cliquer sur Avancé
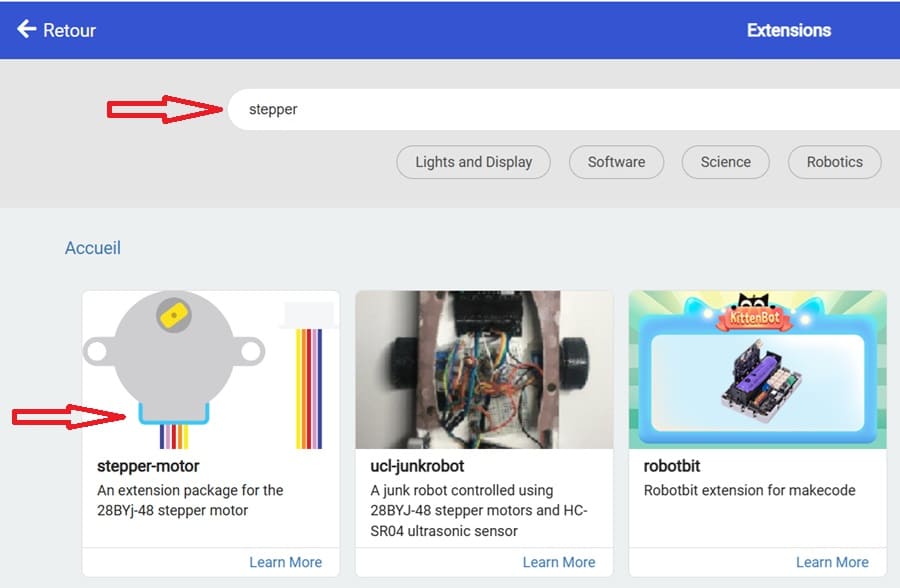
4- Rechercher et ajouter l'extension "stepper" pour contrôler le moteur pas à pas.
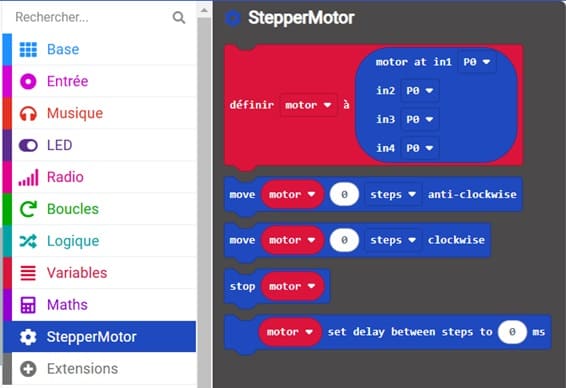
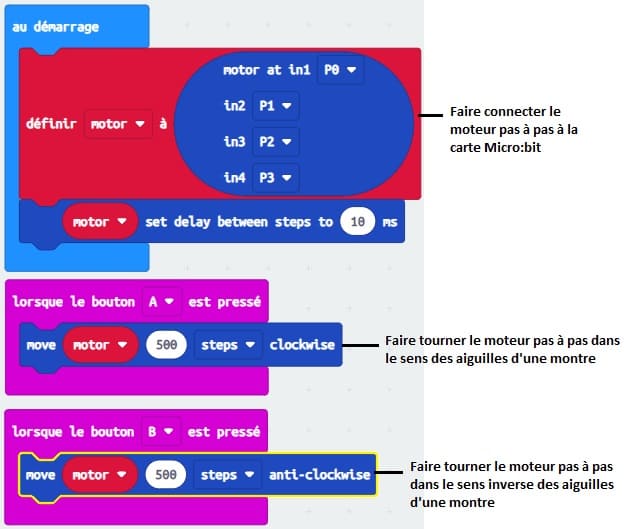
Voici un exemple de programme en Makecode :
0 commentaire
laisser un commentaire
Passion de robotique

Tutoriels récents





Atelier robotique

Tutoriels populaires





Construction des robots

Tutoriels plus commentés



Bras robotique

Categories
Maison intelligente