ESP32 Robot voiture à deux roues commandé via Bluetooth
Plan de tutoriel
1- Fonctionnement du robot voiture commandé par ESP32 et Bluetooth
2- Matériel nécessaire
3- Montage du robot
4- Programmer de la carte ESP32 avec le Micropython
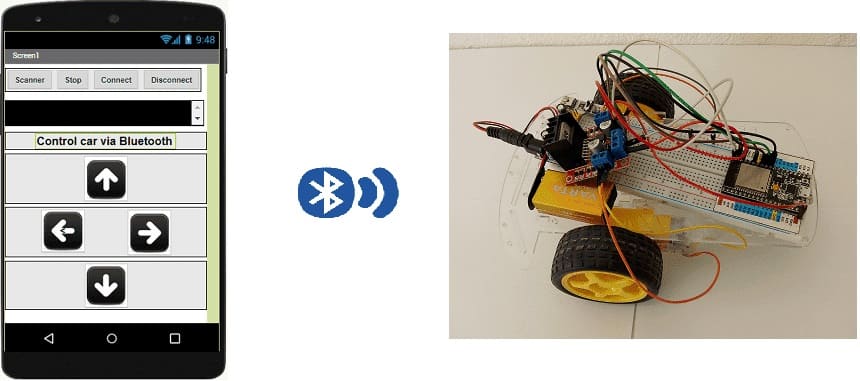
Fonctionnement du robot voiture commandé par ESP32 et Bluetooth
Voici une description détaillée du fonctionnement d'une voiture robot à deux roues utilisant un ESP32 via Bluetooth.
Étape 1 : Connexion Bluetooth
1- L'application mobile recherche les périphériques Bluetooth.
2- Une fois apparié, l'application se connecte à l'ESP32.
3- L'ESP32 attend les commandes envoyées par l'application.
Étape 2 : Réception des commandes
1- L'utilisateur appuie sur un bouton de commande dans l'application (par exemple, "Avancer").
2- L'application envoie le mot "Avancer" à l'ESP32 via Bluetooth.
3- L'ESP32 lit ce mot et met à jour l’état du robot en temps réel.
Matériel nécessaire
Carte ESP32
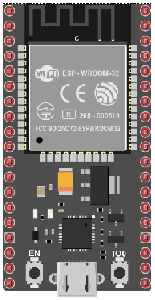
C'est le cerveau du robot. Il reçoit les commandes via Bluetooth et contrôle les moteurs via le module L298N en envoyant des signaux numériques.
Module L298N
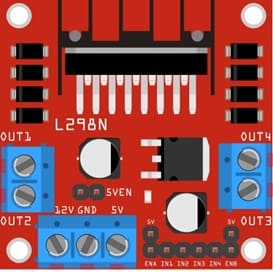
Il pilote de moteur et reçoit les commandes de l'ESP32 et contrôle la vitesse et la direction des moteurs.
Kit robot voitures de 2 roues

Moteurs DC (2 moteurs pour les roues).
Châssis : Structure du robot avec deux roues motrices et une roue folle.
Module Adaptateur 3.3V/5V :

Un module adaptateur 3.3V/5V est un dispositif électronique qui permet de convertir une tension d'entrée (généralement de 5V ou 9V) en une sortie régulée à 3.3V ou 5V, selon les besoins des composants du système.
Batterie :

Fournit l’énergie aux moteurs et à l’ESP32.
Câblage et connecteurs :

Des fils électriques et des connecteurs seront nécessaires pour relier les différents composants entre eux
Plaque d'essai (Breadboard) :

On utilise la plaque d'essai pour faciliter le câblage des différents composants.
Montage du robot
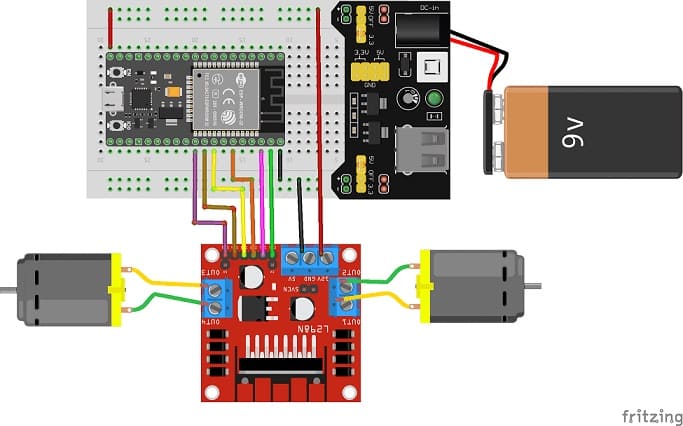
Pour réaliser le montage il faut connecter:
- la broche N°23 de la carte ESP32 à la broche ENA du module L298N.
- la broche N°22 de la carte ESP32 à la broche IN1 du module L298N.
- la broche N°21 de la carte ESP32 à la broche IN2 du module L298N.
- la broche N°19 de la carte ESP32 à la broche IN3 du module L298N.
- la broche N°18 de la carte ESP32 à la broche IN4 du module L298N.
- la broche N°5 de la carte ESP32 à la broche ENB du module L298N.
- la broche GND de la carte ESP32 à la broche GND du module L298N.
- la broche 5V de la carte ESP32 à la broche 5v du module de l’alimentation
- la broche GND de la carte ESP32 à la borne (-) du module de l’alimentation
-la broche 12V du module L298N à la broche 5V du module de l’alimentation
- les deux moteurs de la voiture à la carte L298N
Programmer de la carte ESP32 avec le Micropython
Voici un code simplifié pour contrôler la voiture via Bluetooth :
Tout à d'abord il faut :
1- utiliser le Firmware suivant : esp32-20210902-v1.17.bin.
2- importer :
a- la bibliothèque DCMotor.py pour commander le module L298N.
b- les deux bibliothèques :ble_uart_peripheral.py et ble_advertising.pypour la communication Bluetooth
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 |
from machine import UART from DCMotor import DCMotor from machine import Pin, PWM from time import sleep import bluetooth from ble_uart_peripheral import BLEUART import time import utime frequency = 15000 pin1 = Pin(22, Pin.OUT) pin2 = Pin(21, Pin.OUT) pin3 = Pin(19, Pin.OUT) pin4 = Pin(18, Pin.OUT) enable = PWM(Pin(23), frequency) enable1 = PWM(Pin(5), frequency) dc_motor = DCMotor(pin1, pin2, enable) dc_motor = DCMotor(pin1, pin2, enable, 350, 1023) dc_motor1 = DCMotor(pin3, pin4, enable1) dc_motor1 = DCMotor(pin3, pin4, enable1, 350, 1023) # Create BLE object ble = bluetooth.BLE() # Open UART session for BLE uart = BLEUART(ble) # Define ISR for an UART input on BLE connection def on_rx(): # Read UART string, AppInventor sends raw bytes uart_in = uart.read() # lire le message recu du Smartphone via Bluetooth print("UART IN: ", uart_in.decode()) # afficher le message recu du Smartphone sur le console de Thonny if (uart_in.decode().find('avant')==0): dc_motor.forward(100) # la voiture avance dc_motor1.forward(100) if (uart_in.decode().find('droite')==0): dc_motor.forward(100) # la voiture tourne a droite dc_motor1.forward(10) if (uart_in.decode().find('gauche')==0): dc_motor.forward(10) # la voiture tourne a gauche dc_motor1.forward(100) if (uart_in.decode().find('arriere')==0): dc_motor.backwards(100) # la voiture recule dc_motor1.backwards(100) if (uart_in.decode().find('stop')==0): dc_motor.stop() # la voiture tourne a droite dc_motor1.stop() # Map ISR to UART read interrupt uart.irq(handler=on_rx) uart.close() |
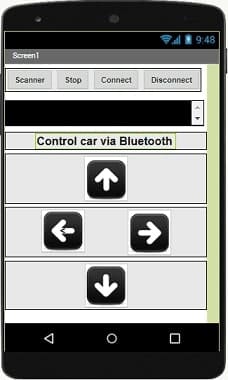
Programmation d'une application mobile avec App Inventor
L'application mobile créée avec MIT App Inventor permet à l'utilisateur de contrôler le robot via Bluetooth.
Voici un exemple simple d'interface dans l'application :
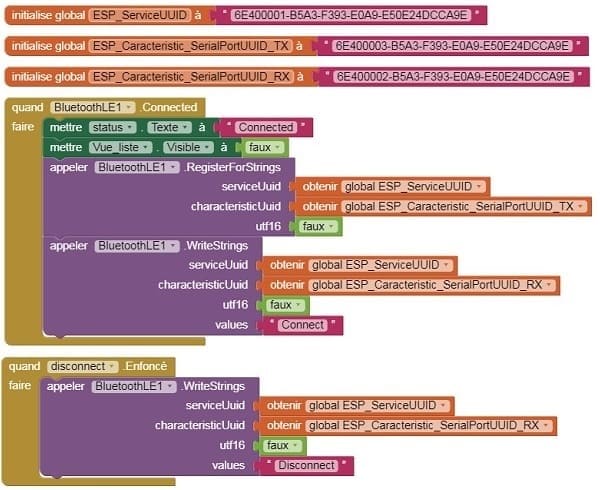
Programmation des blocs
1- Utilisez les composants Bluetooth du designer pour configurer la communication avec l'ESP32.

- L'extension "BluetoothLE1" fait en effet référence à une extension spécifique pour MIT App Inventor qui permet de gérer la communication Bluetooth Low Energy (BLE) dans vos applications mobiles. Cette extension facilite l'interaction entre votre application App Inventor et les périphériques BLE, tels que les capteurs, les appareils de suivi, les dispositifs portables, etc.
- L'extension "BluetoothClient1" dans MIT App Inventor vous permet de créer des applications mobiles qui peuvent se connecter à des dispositifs Bluetooth, comme des modules Bluetooth série (par exemple, HC-06) connectés à des microcontrôleurs, des appareils Bluetooth audio, etc. Cette extension facilite la communication avec ces dispositifs en utilisant des connexions Bluetooth série.
2- À partir d'Android 12, les autorisations Bluetooth ont été renforcées pour améliorer la sécurité et la protection des données des utilisateurs. C'est pour cela on doit déclarer les autorisations dont votre application a besoin dans le fichier AndroidManifest.xml. Pour Bluetooth, vous devrez inclure les autorisations ACCESS_FINE_LOCATION, BLUETOOTH_SCAN, et éventuellement BLUETOOTH_CONNECT, en fonction des fonctionnalités que vous utilisez.
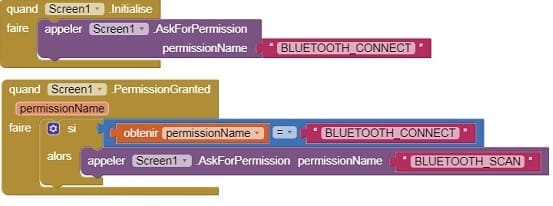
3- Utilisez ces blocs de programmation pour connecter le smartphone à la carte ESP32 via Bluetooth
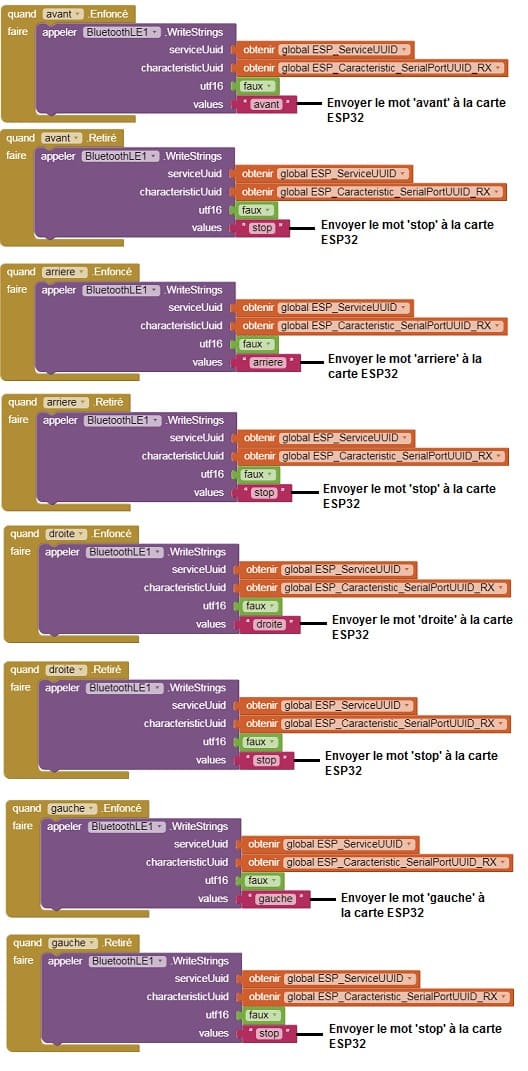
4- Envoie des commandes au robot :
Ajoutez ces blocs pour envoyer les commandes à la carte ESP32 via Bluetooth.
0 commentaire
laisser un commentaire
Passion de robotique

Tutoriels récents





Atelier robotique

Tutoriels populaires





Construction des robots

Tutoriels plus commentés




Bras robotique

Categories
Maison intelligente