Création du jeu Snake avec la carte ESP8266
Plan du tutorial
1- Présenter le jeu Snake
2- L'objectif de notre projet
3- Matériel nécessaire
4- Schéma de câblage du projet
5- Programmation de la carte ESP8266 avec Micropython
Présenter le jeu Snake
Le jeu Snake est un jeu vidéo classique, simple mais addictif, qui consiste à contrôler un serpent qui grandit au fur et à mesure qu'il mange de la nourriture, tout en évitant les obstacles et sa propre queue. Voici une description du principe et du fonctionnement de ce jeu :
Principe de base
1- Contrôle du serpent :
Le joueur contrôle un serpent (ou une ligne) qui se déplace sur une grille ou un écran.
Les mouvements du serpent sont généralement limités à quatre directions : haut, bas, gauche, et droite.
2- Objectif :
Manger des éléments de nourriture qui apparaissent aléatoirement sur la grille.
À chaque fois que le serpent mange un élément de nourriture, il grandit en longueur.
3- Conditions de fin de jeu :
Le jeu se termine si :
a) Le serpent entre en collision avec les bords de l'écran (dans les versions sans murs infinis).
b) Le serpent entre en collision avec sa propre queue.
Mécanisme de fonctionnement
Déplacement continu :
Le serpent avance automatiquement dans la direction choisie par le joueur.
Le joueur peut uniquement changer la direction du mouvement (90 degrés à la fois).
Croissance :
Lorsqu'un élément de nourriture est mangé, une nouvelle section s'ajoute à la queue du serpent, ce qui le rend plus long.
Cela augmente également le score du joueur.
L'objectif de notre projet
L'objectif principal de ce projet est de concevoir et de programmer le jeu classique Snake en utilisant une carte ESP8266, un afficheur LCD I2C, un buzzer pour les effets sonores, et quatre boutons poussoirs pour le contrôle de la direction du Snake.
Objectifs spécifiques :
1- Création du Snake sur l'afficheur LCD :
Dessiner le Snake et les objets (nourriture) sur l'écran LCD en utilisant des caractères ou des blocs.
Mettre à jour en temps réel l'affichage en fonction des mouvements du Snake.
2- Contrôle avec les boutons poussoirs :
Configurer les boutons poussoirs pour permettre les déplacements du Snake (haut, bas, gauche, droite).
Gérer les interruptions ou les états des boutons pour des commandes fluides.
3- Gestion de la logique du jeu :
Faire bouger le Snake sur une grille simulée.
Gérer la collision avec la nourriture qui sera généré aléatoirement.
4- Effets sonores avec le buzzer :
Ajouter des effets sonores pour des actions spécifiques (manger et collision).
Matériel nécessaire
Carte ESP8266 NodeMCU
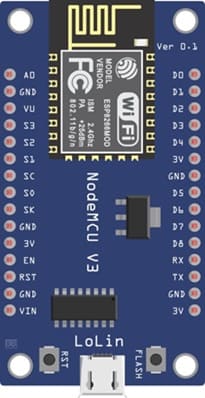
Cœur du système, la carte ESP8266 sert de microcontrôleur pour gérer l'affichage, les entrées des boutons, la logique du jeu et le contrôle du buzzer.
1- La carte ESP8266 Lit les entrées des boutons poussoirs pour déterminer la direction du Snake.
2- Elle gère l'affichage du Snake et des objets sur l'écran LCD en mettant à jour les caractères affichés.
3- Elle contrôle le buzzer pour jouer des sons en réponse aux événements.
Afficheur LCD I2C
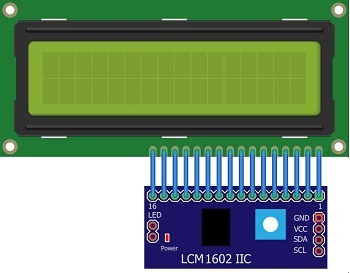
Il Affiche les éléments visuels du jeu Snake, y compris le serpent, la nourriture, et éventuellement le score.
Buzzer passif

Il fournit des effets sonores pour les événements du jeu, comme manger de la nourriture, collision, ou démarrage du jeu.
Boutons poussoirs (x4)
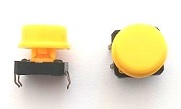
Il permettent de contrôler les mouvements du Snake (haut, bas, gauche, droite).
Chacun des quatre boutons est affecté à une direction spécifique.
Fils de connexion :

Ils sont Utilisés pour relier tous les composants entre eux.
Breadboard

Une breadboard facilite le prototypage sans soudure.
Schéma de câblage du projet
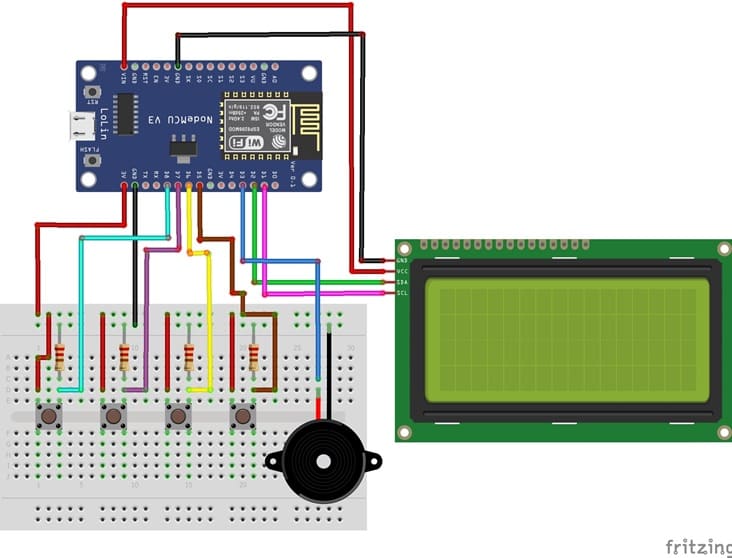
1- Connexion de l'afficheur LCD I2C :
VCC : Connecté à la broche VIN de la carte ESP8266.
GND : Connecté à la broche GND de la carte ESP8266.
SDA : Connecté à la broche D2 (GPIO 4) de la carte ESP8266 pour les données I2C.
SCL : Connecté à la broche D1 (GPIO 5 ) de la carte ESP8266 pour l'horloge I2C.
2- Connexion du Buzzer :
La borne (+) connectée à la broche D3 (GPIO 0) de la carte ESP8266 configuré en sortie.
La borne (-) connectée à la masse (GND) de la carte ESP8266.
Pour le premier bouton (pour la direction gauche):
1- Connectez une patte du premier bouton-poussoir à la broche D8 (GPIO 15) de la carte ESP8266.
2- Mettre une résistance entre cette patte et la broche GND de la carte ESP8266.
3- Connectez une autre patte du premier bouton-poussoir à la broche 3V de la carte ESP8266.
Pour le deuxième bouton (pour la direction droite):
1- Connectez une patte du premier bouton-poussoir à la broche D7 (GPIO 13) de la carte ESP8266.
2- Mettre une résistance entre cette patte et la broche GND de la carte ESP8266.
3- Connectez une autre patte du premier bouton-poussoir à la broche 3V de la carte ESP8266.
Pour le troisième bouton (pour la direction haut) :
1- Connectez une patte du premier bouton-poussoir à la broche D6 (GPIO 12) de la carte ESP8266.
2- Mettre une résistance entre cette patte et la broche GND de la carte ESP8266.
3- Connectez une autre patte du premier bouton-poussoir à la broche 3V de la carte ESP8266.
Pour le quatrième bouton (pour la direction bas) :
1- Connectez une patte du premier bouton-poussoir à la broche D5 (GPIO 14) de la carte ESP8266.
2- Mettre une résistance entre cette patte et la broche GND de la carte ESP8266.
3- Connectez une autre patte du premier bouton-poussoir à la broche 3V de la carte ESP8266.
Programmation de la carte ESP8266 avec Micropython
Le code suivant utilise le langage Micropython pour programmer l'ESP8266.
1- Assurez-vous d'avoir les bibliothèques "i2c_lcd" et "lcd_api" dédiées à l'écran LCD I2C installées .
2- Flashez votre carte ESP8266 avec MicroPython en utilisant Firmware suivant ESP8266_GENERIC-20241129-v1.24.1.bin.
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 |
import machine from machine import Pin, SoftI2C,ADC from lcd_api import LcdApi from i2c_lcd import I2cLcd from time import sleep import urandom import time def randint(min, max): span = max - min + 1 div = 0x3fffffff // span offset = urandom.getrandbits(30) // div val = min + offset return val I2C_ADDR = 0x27 totalRows = 4 totalColumns = 20 i2c = SoftI2C(sda=Pin(4), scl=Pin(5), freq=400000) #D2(SDA) D1(SCL) #initializing the I2C method for ESP32 lcd_snake = I2cLcd(i2c, I2C_ADDR, totalRows, totalColumns) lcd_food = I2cLcd(i2c, I2C_ADDR, totalRows, totalColumns) button_left = Pin(15, Pin.IN) #D8 button_right = Pin(13, Pin.IN) #D7 button_up = Pin(12, Pin.IN) #D6 button_down = Pin(14, Pin.IN) #D5 buzzer = machine.PWM(machine.Pin(0))#D3 # Snake coordonee x=0 y=0 snake='>' # Food coordonnee x1=10 y1=0 # Définir une fonction tone qui prend en entrée un objet Pin représentant le buzzer, une fréquence en Hz et une durée en millisecondes def tone(pin, frequency, duration): pin.freq(frequency) # Définir la fréquence pin.duty(50) # Définir le cycle de service time.sleep_ms(duration) # Pause pour la durée en millisecondes pin.duty(0) # Définir le cycle de service à 0 pour arrêter le son B4 = 494 sens='droite' while True: if button_up.value()==1 : sens='haut' snake='^' if button_right.value()==1 : sens='droite' snake='>' if button_left.value()==1 : sens='gauche' snake='<' if button_down.value()==1 : sens='bas' snake='v' if sens == 'haut' and y>0: y=y-1 # deplacer vers le haut if sens=='droite' and x<19: x=x+1 # deplacer vers la droite if sens=='gauche' and x>0: x=x-1 # deplacer vers le gauche if sens=='bas' and y<3: y=y+1 # deplacer vers le bas if x==x1 and y==y1 : # en cas de collision avec la nourriture tone(buzzer, B4, 500) x1=randint(0, 15) # modifier la position de la nourriture y1=randint(0, 1) lcd_food.move_to(x1,y1) lcd_food.putstr('o') # Afficher la nourrityure sur l'écran LCD lcd_snake.move_to(x,y) lcd_snake.putstr(snake) # Afficher le snake sur l'écran LCD tone(buzzer, B4, 50) # activer le Buzzer à chaque mouvement du Snake sleep(0.5) lcd_snake.clear() lcd_food.clear() |
Explication du programme:
1- Initialisation :
a) Configurer les broches à utiliser pour l'afficheur LCD et les boutons poussoirs.
|
1 2 3 4 5 6 7 8 9 10 11 12 13 |
I2C_ADDR = 0x27 totalRows = 4 totalColumns = 20 i2c = SoftI2C(sda=Pin(4), scl=Pin(5), freq=400000) #D2(SDA) D1(SCL) #initializing the I2C method for ESP32 lcd_snake = I2cLcd(i2c, I2C_ADDR, totalRows, totalColumns) lcd_food = I2cLcd(i2c, I2C_ADDR, totalRows, totalColumns) button_left = Pin(15, Pin.IN) #D8 button_right = Pin(13, Pin.IN) #D7 button_up = Pin(12, Pin.IN) #D6 button_down = Pin(14, Pin.IN) #D5 buzzer = machine.PWM(machine.Pin(0))#D3 |
b) Initialiser l'écran et les positions de la nourriture et le Snake.
|
1 2 3 4 5 6 7 8 |
# Snake coordonee x=0 y=0 snake='>' # Food coordonnee x1=10 y1=0 |
2- Contrôle :
Les boutons permettent de changer la direction.
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 |
if button_up.value()==1 : sens='haut' snake='^' if button_right.value()==1 : sens='droite' snake='>' if button_left.value()==1 : sens='gauche' snake='<' if button_down.value()==1 : sens='bas' snake='v' |
3- Collision :
Vérifie si le Snake touche la nourriture.
|
1 2 3 4 |
if x==x1 and y==y1 : # en cas de collision avec la nourriture tone(buzzer, B4, 500) x1=randint(0, 15) # modifier la position de la nourriture y1=randint(0, 1) |
4- Affichage :
Le Snake et la nourriture sont dessinés sur l'écran.
|
1 2 3 4 |
lcd_food.move_to(x1,y1) lcd_food.putstr('o') # Afficher la nourrityure sur l'écran LCD lcd_snake.move_to(x,y) lcd_snake.putstr(snake) # Afficher le snake sur l'écran LCD |
5- Buzzer : Émet des sons pour signaler les actions (déplacement et collision avec la nourriture).
|
1 |
tone(buzzer, B4, 50) # activer le Buzzer à chaque mouvement du Snake |
0 commentaire
laisser un commentaire
Passion de robotique

Tutoriels récents





Atelier robotique

Tutoriels populaires





Construction des robots

Tutoriels plus commentés




Bras robotique

Categories
Maison intelligente