2- Fonctionnement du robot voiture télécommandé commandé par Micro:bit
3- Composants principaux du robot
4- Schéma du câblage du robot
5- Programmation de la carte Micro:bit avec Makecode
Qu'est ce qu'un robot voiture télécommandé ?
Un robot voiture télécommandé est un dispositif combinant les principes d'un véhicule télécommandé et ceux d'un robot. Ce type de robot peut être contrôlé à distance ou programmé pour exécuter des tâches autonomes. Voici une description détaillée :
Composantes principales :
Châssis : La structure principale, souvent équipée de roues ou de chenilles pour permettre les déplacements.
Système de propulsion : Habituellement constitué de moteurs électriques reliés aux roues pour le mouvement.
Télécommande : Une unité (souvent sans fil, comme un contrôleur radio ou une application mobile) qui permet à l'utilisateur de diriger le robot en temps réel.
Unités de contrôle :
Manuel : Utilisation d'une télécommande pour piloter directement.
Autonome : Le robot est équipé de microcontrôleurs (comme Arduino ou Raspberry Pi) et de capteurs pour prendre des décisions basées sur l'environnement.
Capteurs (optionnel) : Ces capteurs permettent au robot d'interagir avec son environnement. Ils peuvent inclure :
Capteurs de distance (ultrasoniques ou infrarouges) pour éviter les obstacles.
Caméras pour la vision par ordinateur.
Capteurs de ligne pour suivre des trajectoires tracées au sol.
Batteries : Une source d'alimentation pour les moteurs et l'électronique.
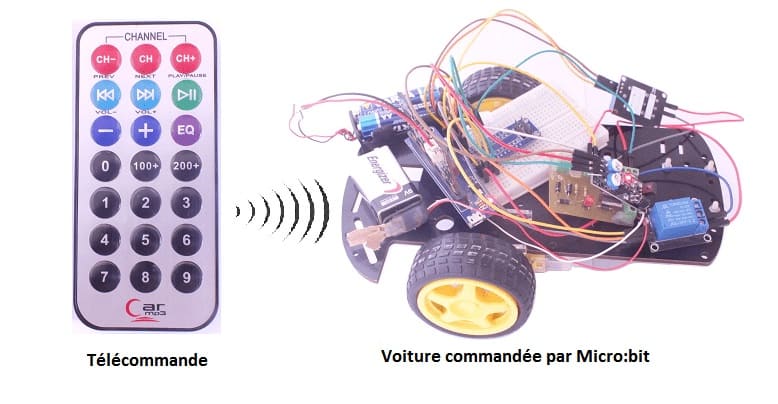
Fonctionnement du robot voiture télécommandé commandé par Micro:bit
Le robot voiture télécommandé combine plusieurs technologies : Micro:bit, module relais, deux moteurs 5V, module KY-032 (détection d'obstacles infrarouge), et une télécommande infrarouge. Voici son fonctionnement détaillé.
1- Transmission :
La télécommande infrarouge émet un signal codé lorsqu’un bouton est pressé.
Chaque bouton correspond à une commande spécifique (avancer, reculer, tourner à gauche, tourner à droite, arrêter).
2- Réception :
Un récepteur infrarouge connecté à la Micro:bit décode le signal et identifie quelle commande a été envoyée.
La Micro:bit agit sur les relais en fonction de la commande reçue.
Fonctionnement des moteurs via relais
Relais et moteurs :
Les relais contrôlent l’alimentation des moteurs gauche et droit.
Chaque moteur est relié à un canal du module relais (un relais pour chaque moteur).
Commande des mouvements :
Avancer : Les deux relais se ferment pour activer les deux moteurs.
Reculer : Les relais coupent ou inversent l’alimentation des moteurs (si le circuit est configuré pour cela).
Tourner à gauche : Le moteur droit est activé, et le moteur gauche est arrêté.
Tourner à droite : Le moteur gauche est activé, et le moteur droit est arrêté.
Arrêt : Les deux relais s'ouvrent pour couper l’alimentation des moteurs.
Composants principaux du robot
Micro:bit(contrôleur principal) :
Elle reçoit des commandes de la télécommande infrarouge et agit sur les relais pour contrôler les moteurs. Elle interprète également les signaux du module KY-032 pour éviter les obstacles.
Carte GPIO pour Micro:bit
Adaptateur permettant de connecter facilement des périphériques externes (comme le relais) à la Micro:bit
Module Relais
Un relais de 5V permettant de contrôler le moteur comme un interrupteur.
Il agit comme un interrupteur pour alimenter ou couper les moteurs en fonction des commandes.
Kit robot :
- Deux roues motrices et un châssis : Les roues sont reliées à des moteurs à courant continu (DC motors) pour le déplacement.
- Roulette omnidirectionnelle Fournit de la stabilité au châssis à l’avant ou à l’arrière.
Module KY-032 :
Il reçoit des commandes de la télécommande.
Télécommande infrarouge :
Elle envoie des commandes au robot via un récepteur infrarouge.
Batterie de 9V
Pour alimenter les deux moteurs
2 piles de 1.5V
pour alimenter la carte Arduino
Câble de connexion
Vous aurez besoin d'un câble pour connecter le capteur KY-032 et les deux relais à la carte Micro:bit.
Plaque d'essai (Breadboard) :
On utilise la plaque d'essai pour faciliter le câblage des différents composants.
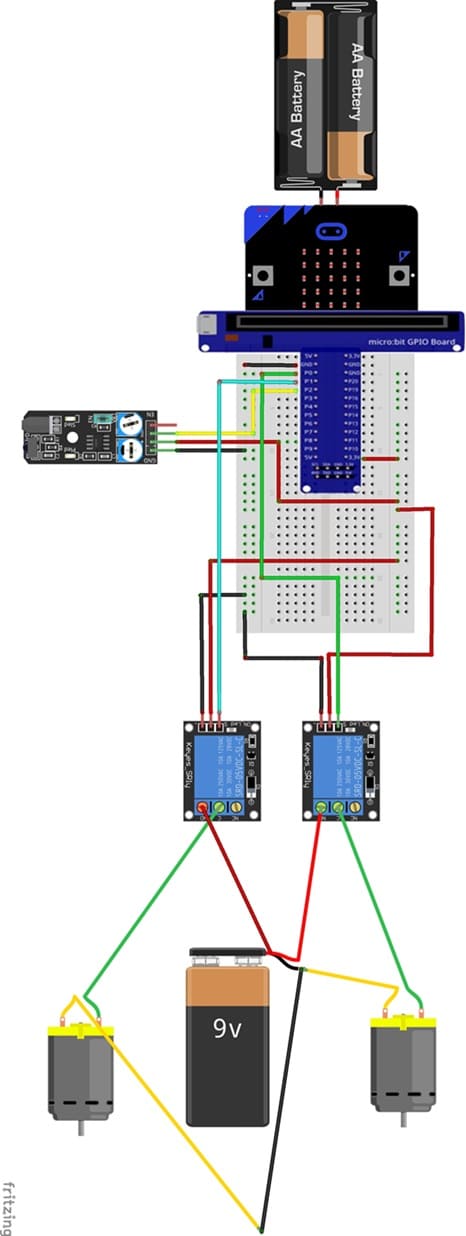
Schéma du câblage du robot
Pour le premier relais:
la broche S à la broche P0 de la carte Micro:bit
la broche (+) à la broche 3.3V de la carte Micro:bit
la broche (-) à la GND de la carte Micro:bit
la broche ON à une énergie de 5V
Pour le deuxième relais:
la broche S à la broche P1 de la carte Micro:bit
la broche (+) à la broche 3.3V de la carte Micro:bit
la broche (-) à la GND de la carte Micro:bit
la broche ON à une énergie de 5V
Pour chacun des deux moteurs:
la première borne à la broche COM du relais
la deuxième borne à la borne GND de la carte Micro:bit
Pour le capteur infraourge IR:
la broche OUT à la broche P2 de la carte Micro:bit
la broche (+) à la broche 3.3V de la carte Micro:bit
la broche GND à la GND de la carte Micro:bit
Programmation de la carte Micro:bit avec Makecode
Voici comment programmer une carte Micro:bit avec MakeCode pour contrôler un robot à deux roues à l'aide d'une télécommande infrarouge.
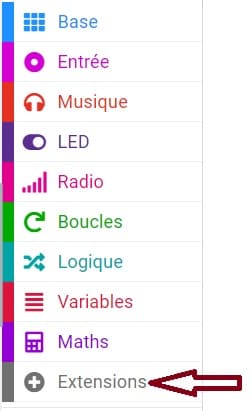
3- Importez la bibliothèque OSYOO-IR-Silvery-Receiver :
Cliquez sur l'onglet "Extensions" dans la barre d'outils supérieure de l'éditeur.
Dans la barre de recherche, saisissez "https://github.com/osoyoo/OSOYOO_IR_V3/" et cliquez sur l'extension "OSYOO-IR-Silvery-Receiver" pour l'importer dans votre projet.
4- Initialisez le capteur infrarouge KY-032 :
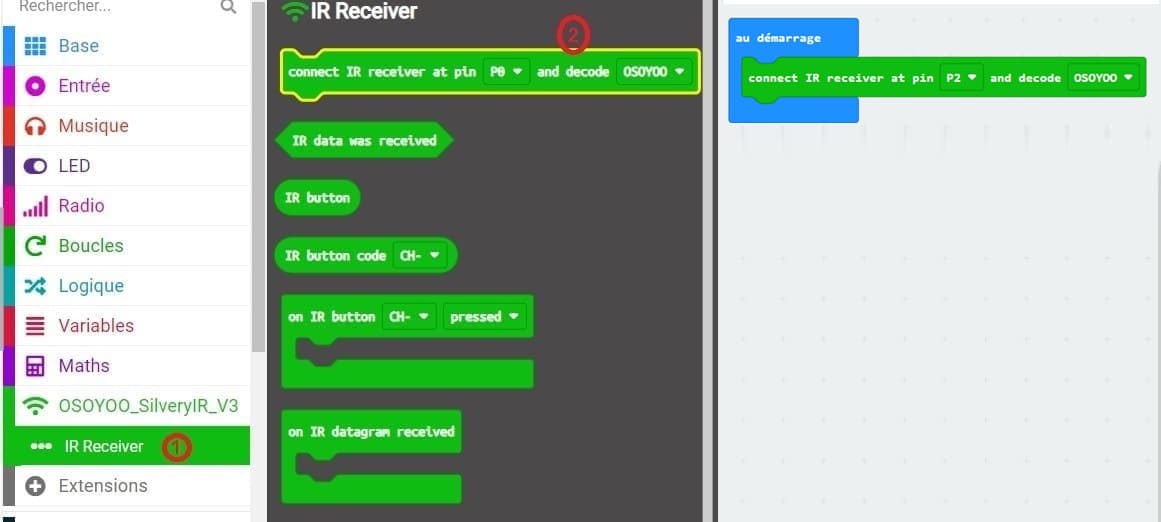
Insérez un bloc "au démarrage" depuis la catégorie "Bases" pour initialiser le programme au démarrage de la carte Micro:bit.
Insérez le bloc "connect IR receiver at pin P0 and decode OSOYOO" depuis la catégorie "OSYOO_SilveryIR_V3" pour initialiser le capteur KY-032. Spécifiez la broche P2 à laquelle le capteur est connecté.
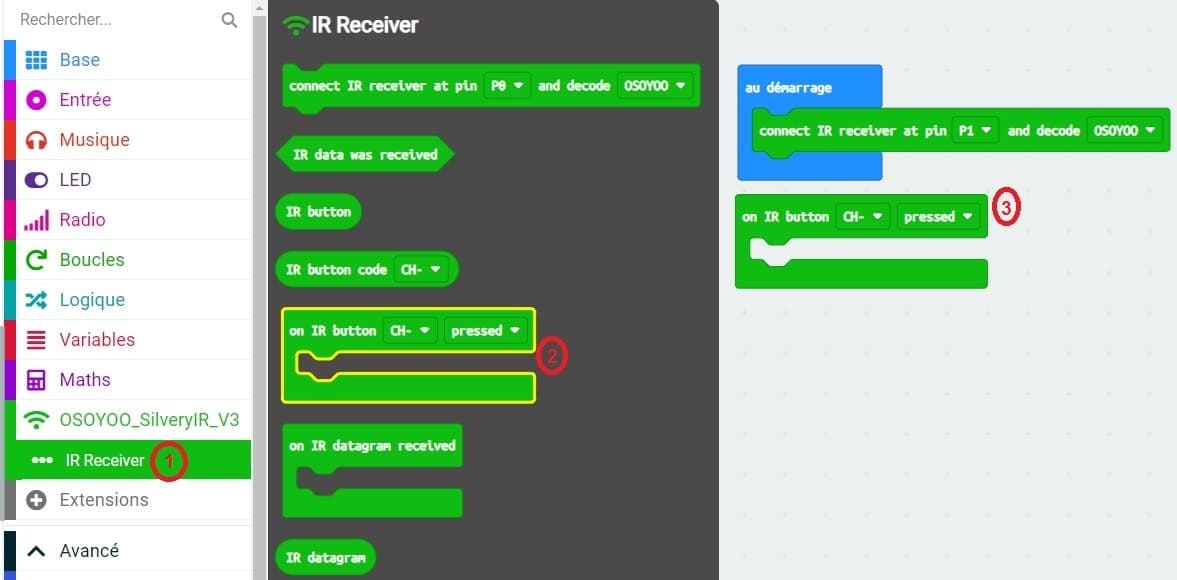
5- Ajoutez un gestionnaire d'événements pour la réception des signaux infrarouges :
- Insérez un bloc "on IR Button" depuis la catégorie "OSYOO_SilveryIR_V3" pour déclencher une action lorsque le signal infrarouge est reçu
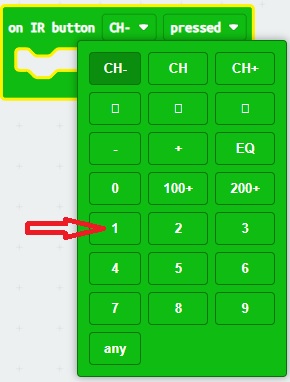
- Spécifier la touche de la télécommande
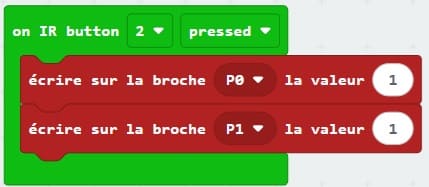
- Insérez un bloc "écrire sur la broche P0 la valeur 1" et "écrire sur la broche P1 la valeur 1" à l'intérieur du bloc "on IR button 2 pressed" pour faire avancer le robot en avant si on appuie sur la touche 2 de la télécommande.
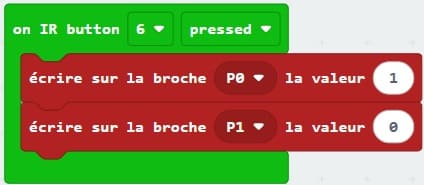
- Insérez un bloc "écrire sur la broche P0 la valeur 1" et "écrire sur la broche P1 la valeur 0" à l'intérieur du bloc "on IR button 6 pressed" pour tourner le robot à droite si on appuie sur la touche 6 de la télécommande.
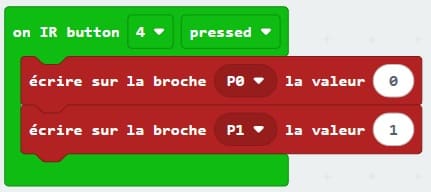
- Insérez un bloc "écrire sur la broche P0 la valeur 0" et "écrire sur la broche P1 la valeur 1" à l'intérieur du bloc "on IR button 4 pressed" pour tourner le robot à gauche si on appuie sur la touche 4 de la télécommande.
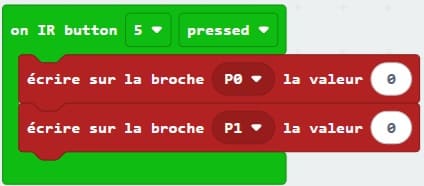
- Insérez un bloc "écrire sur la broche P0 la valeur 0" et "écrire sur la broche P1 la valeur 0" à l'intérieur du bloc "on IR button 4 pressed" pour arrêter le robot si on appuie sur la touche 5 de la télécommande.
La robotique éducative joue un rôle important dans l'éducation des enfants et des jeunes en les aidant à acquérir des compétences en science et technologie.
Dans ce cadre notre site web représente une excellente ressource pour les parents, les enseignants et les enfants qui souhaitent découvrir la robotique.