How ESP32-CAM detect the moving objects ?
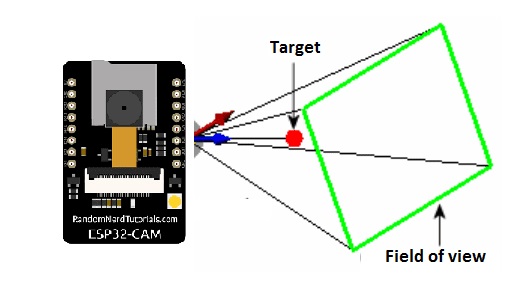
The ESP32-CAM can detect moving objects by using its camera module and implementing motion detection algorithms. This involves analyzing consecutive frames captured by the camera and identifying changes in the scene that indicate motion. Here's an overview of how it works:
How ESP32-CAM Detects Moving Objects:
Capture Frames:
The ESP32-CAM captures consecutive frames from its camera module.
Frame Comparison:
It compares two or more consecutive frames to detect differences.
Differences between frames indicate that something in the scene has moved.
Image Processing Techniques: Common techniques for motion detection include:
Pixel-by-Pixel Difference: Compares the intensity values of pixels in consecutive frames. If the difference exceeds a certain threshold, motion is detected.
Background Subtraction: Maintains a static "background" image and compares each frame to this background. Any deviation indicates motion.
Optical Flow: Tracks the movement of specific features or objects between frames.
Thresholding:
The algorithm sets a sensitivity threshold to distinguish significant motion from minor changes like lighting variations or camera noise.
Bounding Box or Region of Interest (Optional):
Once motion is detected, the algorithm can highlight the moving region (e.g., drawing a bounding box) for further analysis.
Implementation Options:
1. Using ESP32-CAM with OpenCV (via PC or External Processing):
You can stream video from the ESP32-CAM to a PC running Python with OpenCV.
OpenCV offers built-in motion detection tools like cv2.absdiff() (absolute difference between frames).
2. Using ESP32-CAM with MicroPython:
MicroPython libraries can perform basic motion detection using image libraries like OpenMV.
Example: Compare grayscale frames for significant pixel differences.
3. Using ESP32-CAM with Arduino IDE:
The ESP32-CAM can run lightweight motion detection algorithms on its onboard processor.
A basic example involves capturing frames using the ESP32 camera library, converting them to grayscale, and applying pixel comparison.
0 comment
Leave a comment
Passion for robotics

Recent tutorials





Robotics workshop

Polpular tutorials





Making robots

Most commented tutorials




Robotic arm

Categories
Smart Home