Fonctionner un moteur DC 5V par Arduino et le module L298N
Plan de tutoriel
1- Présenter le module L298N
2- Comment la carte Arduino contrôle un moteur DC 5V en utilisant le module L298N ?
3- Composants nécessaires
4- Schéma de câblage des composants
5- Programmation de la carte Arduino UNO
Présenter le module L298N
Le module L298N est un pilote de moteur souvent utilisé dans les projets de robotique et d’automatisation pour contrôler des moteurs à courant continu (DC) ou des moteurs pas à pas. Ce module est basé sur le circuit intégré L298, qui intègre deux ponts en H (H-Bridge) permettant de contrôler deux moteurs indépendamment. Le L298N est populaire dans les projets de la carte Arduino et d'autres microcontrôleurs en raison de sa capacité à gérer des moteurs nécessitant une alimentation plus élevée que ce que les microcontrôleurs peuvent fournir directement.
1. Caractéristiques du Module L298N
Nombre de canaux : 2 (peut contrôler deux moteurs DC ou un moteur pas à pas bipolaire).
Tension d'alimentation des moteurs : Jusqu’à 35V.
Courant maximal : Jusqu'à 2A par canal, ce qui est suffisant pour des moteurs de petite à moyenne puissance.
Protection thermique : Protection intégrée contre la surchauffe.
Régulateur de tension 5V : Alimente le circuit logique si l’alimentation est supérieure à 7V, mais il peut être désactivé.
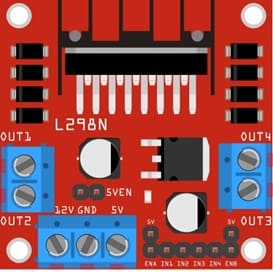
2. Brochage du Module L298N
Voici les principales broches et connexions du module :
VCC : Alimentation pour les moteurs (jusqu'à 35V).
GND : Masse commune pour l’alimentation et le microcontrôleur.
5V : Sortie 5V pour alimenter le circuit logique (si le régulateur est actif).
IN1, IN2 : Entrées de contrôle pour le moteur 1 (pour gérer la direction).
IN3, IN4 : Entrées de contrôle pour le moteur 2 (pour gérer la direction).
ENA et ENB : Broches d'activation pour les moteurs 1 et 2 (permet de contrôler la vitesse en utilisant un signal PWM).
OUT1, OUT2 : Sorties pour le moteur 1.
OUT3, OUT4 : Sorties pour le moteur 2.
3. Principe de Fonctionnement
Le module L298N utilise deux ponts en H, qui permettent de contrôler la polarité du courant alimentant les moteurs. En inversant cette polarité, il est possible de faire tourner les moteurs dans les deux directions (avant et arrière).
En appliquant une entrée haute (HIGH) sur l’une des broches IN1 ou IN2 et une entrée basse (LOW) sur l'autre, le moteur tournera dans un sens.
En inversant les signaux sur ces entrées, le moteur tournera dans l'autre sens.
Les broches ENA et ENB contrôlent l’activation des moteurs, permettant aussi d’ajuster la vitesse via un signal PWM (modulation de largeur d’impulsion).
Comment la carte Arduino contrôle un moteur DC 5V en utilisant le module L298N ?
Le module L298N dispose de deux canaux de contrôle de moteur, permettant ainsi de contrôler deux moteurs DC. Chaque moteur est contrôlé via deux broches de direction (IN1 et IN2 pour le moteur 1) et une broche d’activation (ENA pour le moteur 1).
Direction du moteur : La polarité des signaux envoyés sur IN1 et IN2 détermine le sens de rotation.
Vitesse du moteur : La broche ENA (activation) reçoit un signal PWM (modulation de largeur d'impulsion) de lArduino, permettant de réguler la vitesse du moteur en ajustant le rapport cyclique du signal PWM.
En résumé, la carte Arduino UNO envoie des signaux de contrôle de direction et de vitesse au module L298N, qui pilote le moteur DC 5V dans les deux sens avec une vitesse variable.
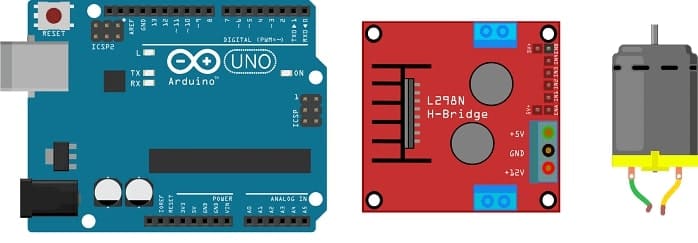
Composants nécessaires
Arduino UNO :

Microcontrôleur qui envoie des signaux de commande pour la direction et la vitesse du moteur.
Module L298N :
Ce module pilote de moteur qui utilise des ponts en H pour contrôler la polarité et l'alimentation du moteur.
Moteur DC 5V :

Ce moteur est alimenté à partir du module L298N.
Source d'alimentation externe :

Une batterie 9V (car le L298N consomme de l'énergie pour ses circuits).
Fils de connexion :

Des fils électriques et des connecteurs seront nécessaires pour relier les différents composants entre eux et à la carte Arduino UNO.
Schéma de câblage des composants
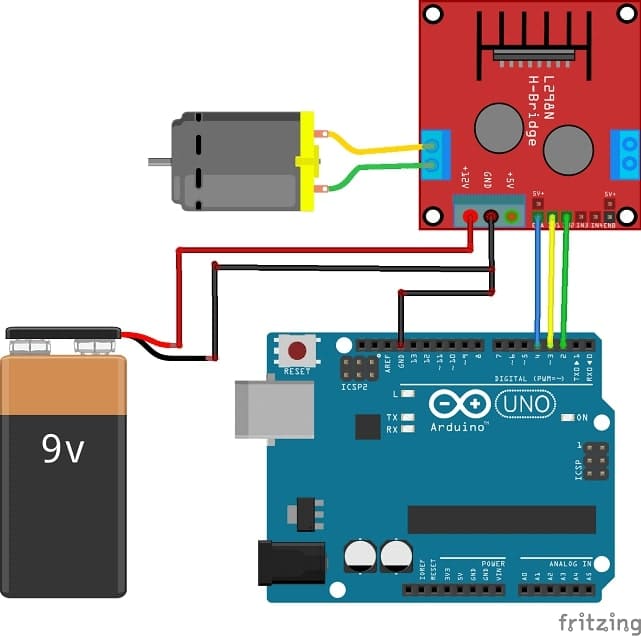
Alimentation du Module L298N :
Connectez VCC (12V) du module L298N à la source d'alimentation (batterie 9V).
Connectez GND du module L298N à la masse de l’alimentation (batterie 9V).
Contrôle de Direction et de Vitesse :
Connectez IN1 et IN2 du L298N aux broches numériques de la carte Arduino UNO (broche N°3 et broche N°2) pour contrôler la direction.
Connectez ENA à une broche PWM de la carte Arduino UNO (par exemple, Broche N°4) pour le contrôle de la vitesse.
Connexion du Moteur DC :
Connectez le moteur DC entre OUT1 et OUT2 du module L298N.
Programmation de la carte Arduino UNO
Le code ci-dessous permet de contrôler la direction et la vitesse du moteur via la carte Arduino UNO
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 |
// connect motor controller pins to Arduino digital pins // motor one int enA = 4; int in1 = 3; int in2 = 2; void setup() { //Initialize Serial Monitor Serial.begin(9600); // set all the motor control pins to outputs pinMode(enA, OUTPUT); pinMode(in1, OUTPUT); pinMode(in2, OUTPUT); analogWrite(enA, 255); } void loop() { //le moteur tourne digitalWrite(in1, HIGH); digitalWrite(in2, LOW); delay(2000); //stop le moteur digitalWrite(in1, LOW); digitalWrite(in2, LOW); delay(1000); //le moteur tourne dans le sens inverse digitalWrite(in1, LOW); digitalWrite(in2, HIGH); delay(2000); //stop le moteur digitalWrite(in1, LOW); digitalWrite(in2, LOW); delay(1000); } |
3 commentaires

Latest evening dress models 18-03-2626
After I originally commented I seem to have clicked the -Notify me when new comments are added- checkbox and now whenever a comment is added I recieve 4 emails with the same comment. Perhaps there is an easy method you can remove me from that service? Thank you!
adminbimm 06-02-2525
Non je ne vous conseille pas d'utiliser source d'alimentation de 12V.
huik 06-02-2525
Bonjour et merci pour ce tuto Comment se fait il que vous mettez une source d'alimentation de 9V pour un moteur de 5v? J'ai a ma disposition du 12v. Est ce que je peux l'utiliser pour un moteur de 5V? Merci d'avance pour vos conseils
laisser un commentaire
Passion de robotique

Tutoriels récents





Atelier robotique

Tutoriels populaires





Construction des robots

Tutoriels plus commentés




Bras robotique

Categories
Maison intelligente

But de ce site web
La robotique éducative joue un rôle important dans l'éducation des enfants et des jeunes en les aidant à acquérir des compétences en science et technologie.
Dans ce cadre notre site web représente une excellente ressource pour les parents, les enseignants et les enfants qui souhaitent découvrir la robotique.
Coordonnées
Zaouiet Kontech-Jemmel-Monastir-Tunisie
Articles populaires
Photos des articles






Site robotique réalisé par Mohamed Ali Haj Salah - Prof Info